Call Service

Libraries:
ROS Toolbox /
ROS 2
Description
Use the Call Service block to implement a ROS 2 Service client in
Simulink®. The Call Service block takes a ROS 2 service request message,
sends it to the ROS 2 service server, and waits for a response. A ROS 2 service server should
be set up somewhere on the network before using this block. Check the available services on a
ROS 2 network by executing ros2 service list command, which uses ros2 function. Use
ros2svcserver to set
up a service server in MATLAB®.
Specify the name for your ROS 2 service and the service type in the block mask. If connected to a ROS 2 network, you can select from a list of available services. You can create a blank service request or response message to populate with data using the Blank Message block.
Always specify the quality of service (QoS) parameters in the block mask. QoS parameters for this block must be compatible with the service server to send requests and receive responses.
Examples
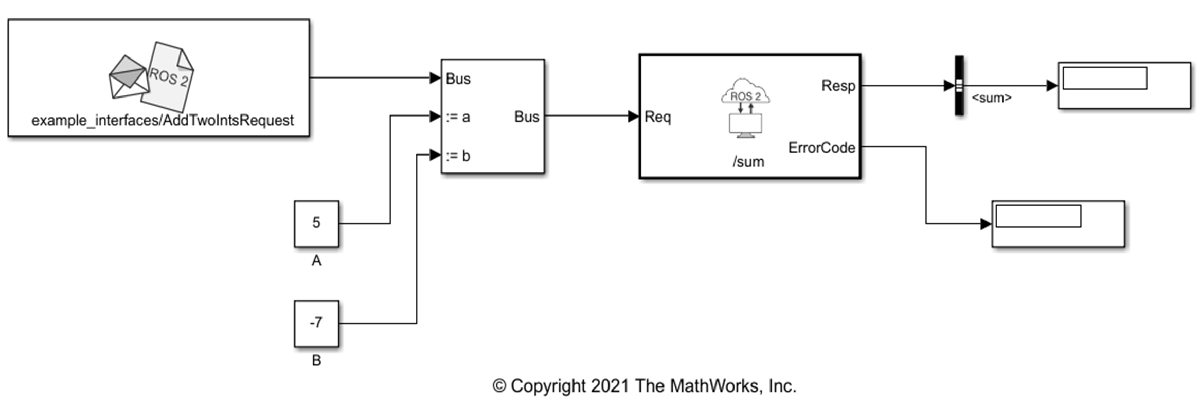
Call ROS 2 Service in Simulink
Call a service on the ROS 2 network in Simulink using the Call Service block and receive a response.

Call and Provide ROS 2 Services
Set up service servers to advertise a service to the ROS network. In addition, you will learn how to use service clients to call the server and receive a response.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2021b