Simulink에서 ROS 메시지 퍼블리시 및 서브스크라이브
이 모델은 Simulink®를 사용하여 ROS 토픽을 퍼블리시하고 서브스크라이브하는 방법을 보여줍니다.
open_system('rosPubSubExample.slx')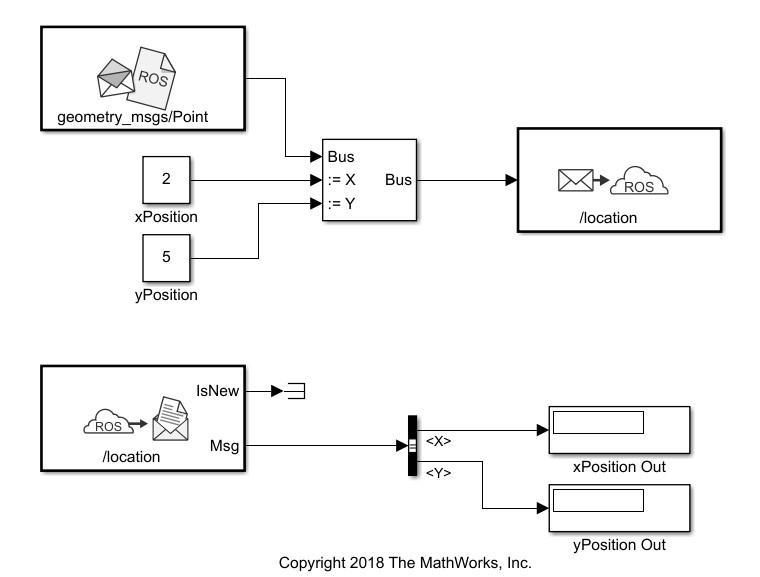
Blank Message 블록과 Bus Assignment 블록을 사용하여 'geometry_msgs/Point' 메시지 유형의 X 값과 Y 값을 지정합니다. Blank Message 블록 마스크를 열어 메시지 유형을 지정합니다. Bus Assignment 블록 마스크를 열어 할당하려는 신호를 선택합니다. 오른쪽 열에서 '???'가 있는 값은 모두 제거합니다. Bus Assignment 블록에 X와 Y에 대한 관련 값을 제공합니다.
Bus 출력을 Publish 블록에 전달합니다. 블록 마스크를 열고 토픽 소스로 Specify your own을 선택합니다. 토픽 '/location'과 메시지 유형 'geoemetry_msgs/Point'를 지정합니다.
Subscribe 블록을 추가하고 토픽과 메시지 유형을 지정합니다. 출력 Msg를 Bus Selector에 전달하고 블록 마스크에서 선택한 신호를 지정합니다. X 값과 Y 값을 표시합니다.
모델을 실행하기 전에 rosinit를 호출하여 ROS 네트워크에 연결합니다.
rosinit
Launching ROS Core... Status before launching ros core :0 result before launching ros core: 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576569 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576571 pts/0 S+ 0:00 grep -E ros|python Done in 0.56434 seconds. * Inside getProcessPID function * Process Name: /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 Status before getting PID :0 Result before getting PID : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576594 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576596 pts/0 S+ 0:00 grep -E ros|python Result: 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 Status: 0 PID obtained: 576574 Status after getting PID :0 Result after getting PID : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576601 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576603 pts/0 S+ 0:00 grep -E ros|python * Exiting getProcessPID function * Status after launching ros core :0 result after launching ros core: 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576604 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576606 pts/0 S+ 0:00 grep -E ros|python Status before deleting node :0 Result before deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576607 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 710 -1 -mvmOutputPipe -1 713 576622 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576624 pts/0 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576628 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576630 pts/0 S+ 0:00 grep -E ros|python Initializing ROS master on http://172.20.144.177:53331. Initializing global node /matlab_global_node_14008 with NodeURI http://dcc870602glnxa64:34509/ and MasterURI http://localhost:53331.
모델을 실행합니다. xPosition Out 디스플레이와 yPosition Out 디스플레이에 ROS 네트워크에 퍼블리시된 해당 값이 표시되는 것을 확인할 수 있습니다.
sim('rosPubSubExample')Status before deleting node :0 Result before deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576631 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 709 -1 -mvmOutputPipe -1 712 576650 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 709 -1 -mvmOutputPipe -1 714 576693 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576695 pts/0 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576631 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 709 -1 -mvmOutputPipe -1 712 576699 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576701 pts/0 S+ 0:00 grep -E ros|python
ROS 네트워크를 종료합니다.
rosshutdown
Shutting down global node /matlab_global_node_14008 with NodeURI http://dcc870602glnxa64:34509/ and MasterURI http://localhost:53331. Status before deleting node :0 Result before deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576631 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 709 -1 -mvmOutputPipe -1 712 576704 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576706 pts/0 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576710 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576712 pts/0 S+ 0:00 grep -E ros|python Shutting down ROS master on http://172.20.144.177:53331. Status before deleting core :0 Result before deleting core : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576574 pts/0 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25a_2974004_1607018/tp208e873a_38a3_45cc_9414_9c5f843940e4/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 53331 -w 3 576586 pts/0 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 53331 -w 3 576713 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576715 pts/0 S+ 0:00 grep -E ros|python * Inside killProcessByPID function * PID of core to be killed: 576574 Status after Child Process Killed: 0 Result after Child Process Killed: Status after deleting core :0 Result after deleting core : 894 ? Ssl 17:18 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1159 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 574821 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574851 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25a_2974004_1607018 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574852 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25a/logs/2974004/build.glnxa64.2974004.r000/examples/ros/build.glnxa64.2974004.r000.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 574885 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25a.2974004/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 576720 pts/0 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 576722 pts/0 S+ 0:00 grep -E ros|python * Exiting killProcessByPID function *