Call ROS Service in Simulink
Use the Call Service block to call a service on the ROS service server.
Connect to a ROS network.
rosinit
Launching ROS Core... Done in 0.68878 seconds. Initializing ROS master on http://172.30.144.147:60668. Initializing global node /matlab_global_node_81441 with NodeURI http://dcc2828538glnxa64:46195/ and MasterURI http://localhost:60668.
Set up a roscpp_tutorials/TwoInts service server message type and specify an example helper callback function. The call back function provided sums the A and B elements of a roscpp_tutorials/TwoIntsRequest message. The service server must be set up before you can call a service client.
sumserver = rossvcserver('/sum','roscpp_tutorials/TwoInts',@exampleHelperROSSumCallback);
Open a Simulink® model with the Call Service block. Use the Blank Message block to output a request message with the roscpp_tutorials/TwoIntsRequest message type. Populate the bus with two values to sum together.
open_system('ros_twoint_service_simulink_example.slx')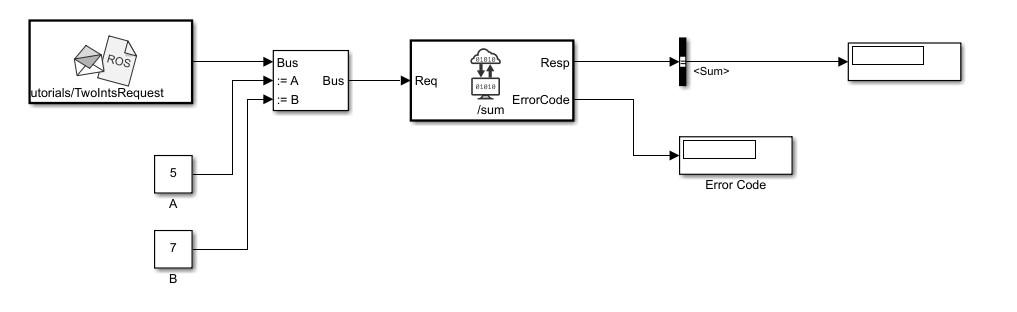
Run the model. The service call should return 0 in the Resp output as part of the response message. An error code of 0 indicates the service call was successful. You can ignore warnings about converting data types.
sim('ros_twoint_service_simulink_example.slx')Shut down the ROS network to disconnect.
rosshutdown
Shutting down global node /matlab_global_node_81441 with NodeURI http://dcc2828538glnxa64:46195/ and MasterURI http://localhost:60668. Shutting down ROS master on http://172.30.144.147:60668.