네트워크 액세스
MATLAB® 및 Simulink®를 통해 ROS 2 네트워크와 ROS 네트워크에 연결
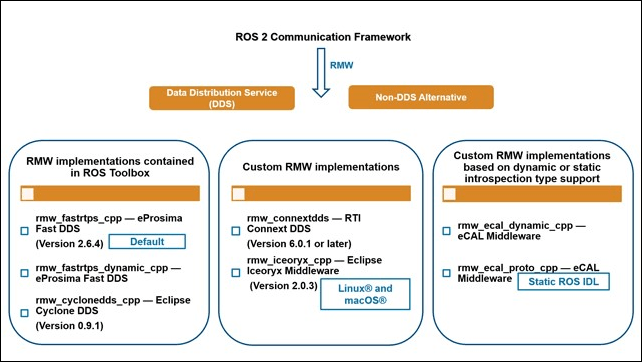
ROS Toolbox는 기존의 ROS 및 ROS 2 네트워크에 연결하는 인터페이스를 제공할 수 있으며, 또한 MATLAB과 Simulink를 사용하는 데스크탑 시뮬레이션과 하드웨어 인터페이스를 위한 ROS 및 ROS 2 네트워크를 만들 수 있습니다. ROS 및 ROS 2 노드를 생성하거나 액세스하고 subscriber와 publisher를 사용하여 이들 노드 간의 통신을 설정할 수 있습니다. 또한 이 네트워크에서 ROS 및 ROS 2 파라미터와 변환을 생성하거나 액세스할 수 있습니다. ROS 및 ROS 2 노드에 대한 자세한 내용은 Connect to a ROS Network 항목과 Connect to a ROS 2 Network 항목을 참조하십시오.
서비스 클라이언트로부터 요청을 받아 작업을 수행하고 응답을 전달하는 ROS 및 ROS 2 서비스 서버를 생성하거나 액세스할 수 있습니다. ROS 및 ROS 2 서비스에 대한 자세한 내용은 Call and Provide ROS Services 항목과 Call and Provide ROS 2 Services 항목을 참조하십시오.
액션 클라이언트로부터 목표 실행 요청을 받고 목표 실행을 처리하는 동안 피드백을 전달하는 ROS 및 ROS 2 액션 서버를 생성하고 액세스할 수 있습니다. ROS 액션에 대한 자세한 내용은 ROS Actions Overview 항목을 참조하십시오.
카테고리
- ROS 2 네트워크 액세스
MATLAB 및 Simulink를 통해 ROS 2 네트워크에 연결
- ROS 네트워크 액세스
MATLAB 및 Simulink를 통해 ROS 네트워크에 연결
추천 예제











You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)