이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
minjerkpolytraj
구문
설명
[는 주어진 입력 웨이포인트를 대응하는 시간 지점에 구현하는 최소 저크 다항식 궤적을 생성합니다. 이 함수는 주어진 샘플 개수 q,qd,qdd,qddd,pp,tPoints,tSamples] = minjerkpolytraj(waypoints,timePoints,numSamples)numSamples에서 위치, 속도, 가속도, 저크를 반환합니다. 또한 시간에 대한 다항식 궤적의 조각별 다항식 pp 형식과 시간 지점 tPoints, 샘플 시간 tSamples를 모두 반환합니다.
[는 저크와 총 세그먼트 시간 비용의 조합을 최적화합니다. 이 경우, 함수는 q,qd,qdd,qddd,pp,tPoints,tSamples] = minjerkpolytraj(___,TimeAllocation = true)timePoints를 웨이포인트에 도착한 시간에 대한 초기 추측값으로 처리합니다.
예제
주어진 일련의 2차원 xy 웨이포인트와 함께 minjerkpolytraj 함수를 사용합니다. 웨이포인트에 대한 시간 지점도 주어집니다.
wpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = 0:5;
출력 궤적의 샘플 개수를 지정합니다.
numsamples = 100;
최소 저크 궤적을 계산합니다. 이 함수는 주어진 샘플 개수에서 궤적 위치(q), 속도(qd), 가속도(qdd), 저크(qddd)를 반환합니다.
[q,qd,qdd,qddd,pp,timepoints,tsamples] = minjerkpolytraj(wpts,tpts,numsamples);
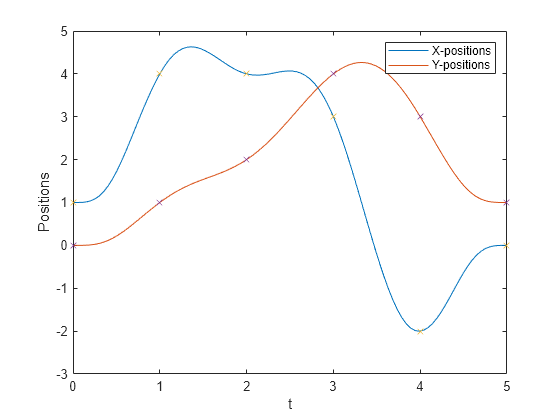
x 위치와 y 위치에 대한 궤적을 플로팅합니다. 각 웨이포인트와 궤적을 비교합니다.
plot(tsamples,q) hold on plot(timepoints,wpts,'x') xlabel('t') ylabel('Positions') legend('X-positions','Y-positions') hold off
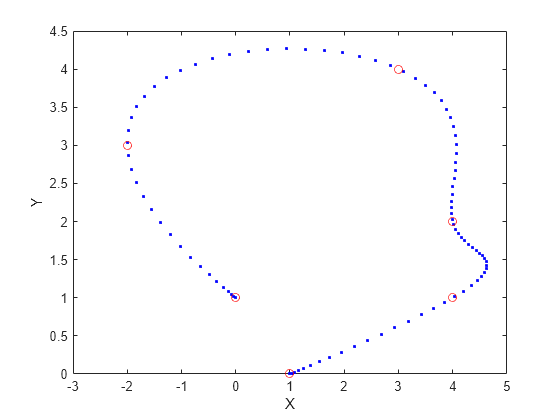
2차 평면에서 실제 위치를 확인할 수도 있습니다. q 벡터와 웨이포인트의 개별 행을 x 위치와 y 위치로 플로팅합니다.
figure plot(q(1,:),q(2,:),'.b',wpts(1,:),wpts(2,:),'or') xlabel('X') ylabel('Y')
입력 인수
이름-값 인수
출력 인수
참고 문헌
[1] Bry, Adam, Charles Richter, Abraham Bachrach, and Nicholas Roy. “Aggressive Flight of Fixed-Wing and Quadrotor Aircraft in Dense Indoor Environments.” The International Journal of Robotics Research, 34, no. 7 (June 2015): 969–1002.
[2] Richter, Charles, Adam Bry, and Nicholas Roy. “Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments." Paper presented at the International Symposium of Robotics Research (ISRR 2013), 2013.
확장 기능
버전 내역
R2021b에 개발됨