Minimum Jerk Polynomial Trajectory
Generate minimum jerk polynomial trajectories through multiple waypoints
Since R2022a
Libraries:
UAV Toolbox /
Algorithms
Robotics System Toolbox /
Utilities
Description
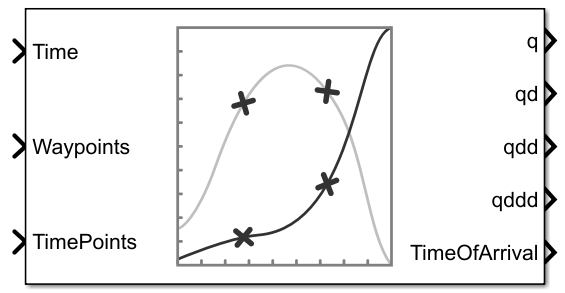
The Minimum Jerk Polynomial Trajectory block generates minimum jerk
polynomial trajectories that pass through the waypoints at the times specified in time points.
The block outputs positions, velocities, accelerations, jerks, and time of arrival for
achieving this trajectory based on the Time input.
The block also accepts boundary conditions for waypoints. The block also outputs the coefficients for the polynomials and status of the trajectory generation.
The initial and final values of positions, velocities, accelerations, and jerks of the
trajectory are held constant outside the time period defined in TimePoints input.
Examples
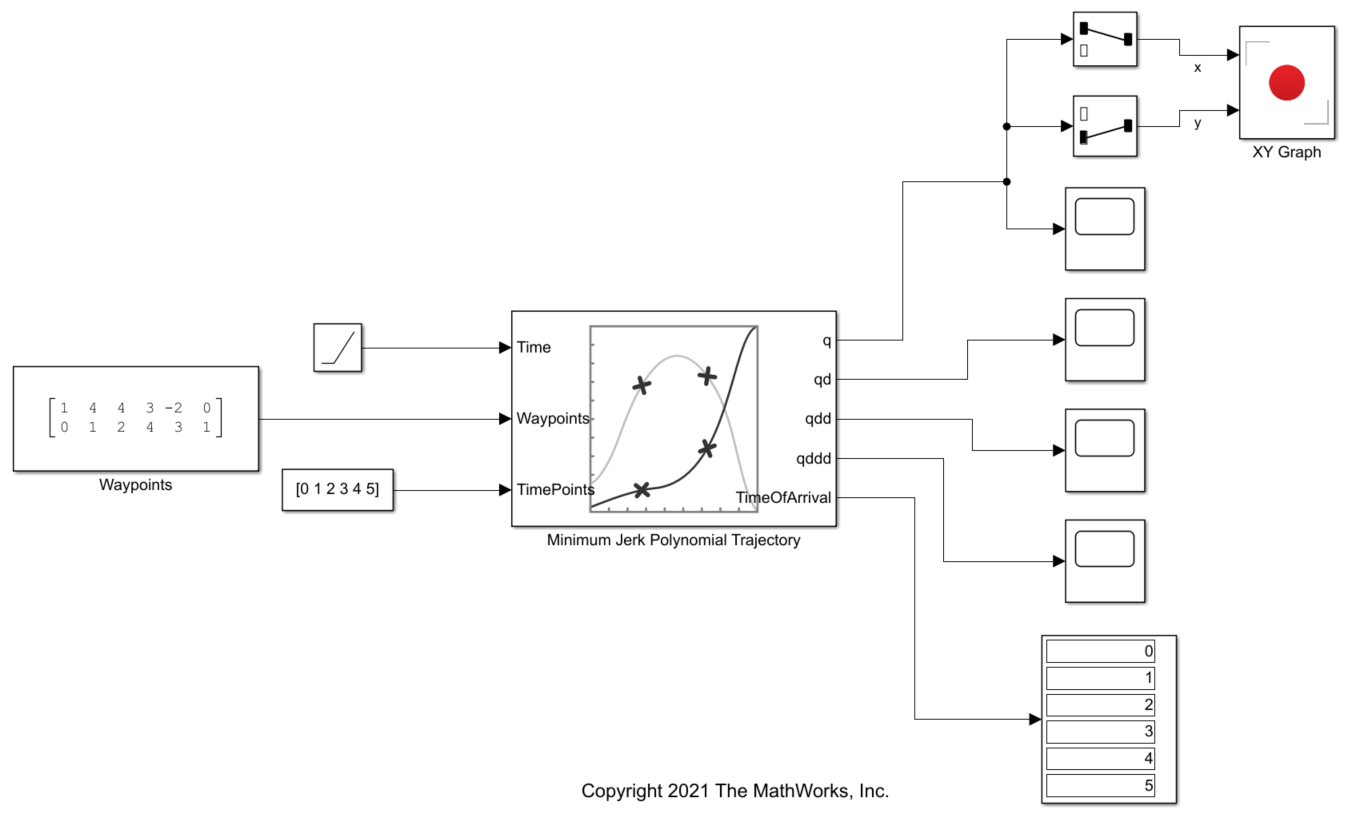
Generate Minimum Jerk Trajectory
Generate a minimum jerk trajectory using the Minimum Jerk Polynomial Trajectory block in Simulink®.
Ports
Input
Output
Parameters
Tips
For better performance, consider these options:
Minimize the number of waypoint or parameter changes.
Set the
Simulate usingparameter toCode generation. For more information, see Interpreted Execution vs. Code Generation (Simulink).
References
[1] Bry, Adam, Charles Richter, Abraham Bachrach, and Nicholas Roy. “Aggressive Flight of Fixed-Wing and Quadrotor Aircraft in Dense Indoor Environments.” The International Journal of Robotics Research, 34, no. 7 (June 2015): 969–1002.
[2] Richter, Charles, Adam Bry, and Nicholas Roy. “Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments." Paper presented at the International Symposium of Robotics Research (ISRR 2013), 2013.
Extended Capabilities
Version History
Introduced in R2022a