transformtraj
두 변환 사이의 궤적 생성
구문
설명
예제
두 개의 방향과 위치에서 변환을 만듭니다. 보간을 위한 시간 간격과 시간으로 구성된 벡터를 지정합니다.
t0 = axang2tform([0 1 1 pi/4])*trvec2tform([0 0 0]); tF = axang2tform([1 0 1 6*pi/5])*trvec2tform([1 1 1]); tInterval = [0 1]; tvec = 0:0.01:1;
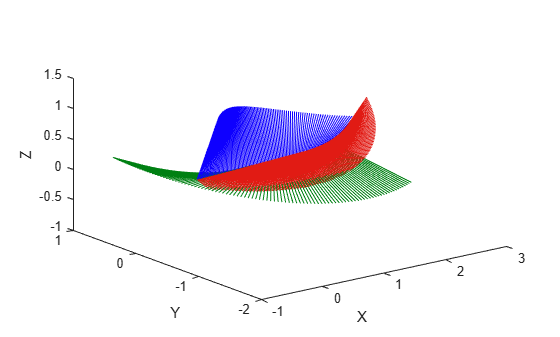
점 사이를 보간합니다. plotTransforms를 사용하여 궤적을 플로팅합니다. 변환을 쿼터니언 회전과 선형 천이로 변환합니다. Figure가 좌표 프레임의 모든 중간 변환을 보여줍니다.
[tfInterp, v1, a1] = transformtraj(t0,tF,tInterval,tvec); rotations = tform2quat(tfInterp); translations = tform2trvec(tfInterp); plotTransforms(translations,rotations) xlabel('X') ylabel('Y') zlabel('Z')
축-각 회전에서 첫 번째 변환을 구축하고 축-각 회전과 변환 모두에서 마지막 변환을 구축합니다.
t0 = se3([0 1 1 pi/4],"axang"); tF = se3([1 0 1 6*pi/5],"axang")*se3([1 1 1],"trvec");
보간을 위한 시간 간격과 시간으로 구성된 벡터를 지정합니다.
tInterval = [0 1]; tvec = 0:0.01:1;
변환 사이를 보간합니다. plotTransforms를 사용하여 궤적을 플로팅합니다.
[tfInterp] = transformtraj(t0,tF,tInterval,tvec); plotTransforms(tfInterp(1:10:end))

입력 인수
이름-값 인수
출력 인수
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
확장 기능
버전 내역
R2019a에 개발됨참고 항목
bsplinepolytraj | contopptraj | cubicpolytraj | quinticpolytraj | rottraj | trapveltraj