differentialDriveKinematics
차동 구동 이동체 모델
설명
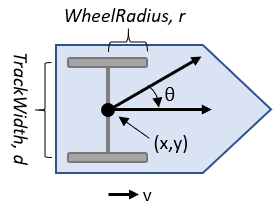
differentialDriveKinematics는 단순한 이동체 동역학을 시뮬레이션하는 차동 구동 이동체 모델을 만듭니다. 이 모델은 하나의 고정된 차축이 있고 두 바퀴가 지정된 차륜 거리만큼 떨어져 있는 이동체를 나타냅니다. 바퀴는 독립적으로 구동할 수 있습니다. 이동체 속도와 방향은 차축의 중심으로부터 정의됩니다. 이동체 상태는 3개 요소 벡터 [x y theta]로 정의됩니다. 여기서 전역 xy 위치는 미터 단위로 지정되고 이동체 방향 theta는 라디안 단위로 지정됩니다. 모델의 시간 도함수 상태를 계산하기 위해 입력 명령과 현재 로봇 상태를 지정하여 derivative 함수를 사용합니다.
생성
구문
설명
kinematicModel = differentialDriveKinematics
kinematicModel = differentialDriveKinematics(Name,Value)
속성
객체 함수
derivative | 이동체 상태의 시간 도함수 |
예제
로봇 만들기
로봇을 정의하고 초기 시작 위치와 방향을 설정합니다.
kinematicModel = differentialDriveKinematics; initialState = [0 0 0];
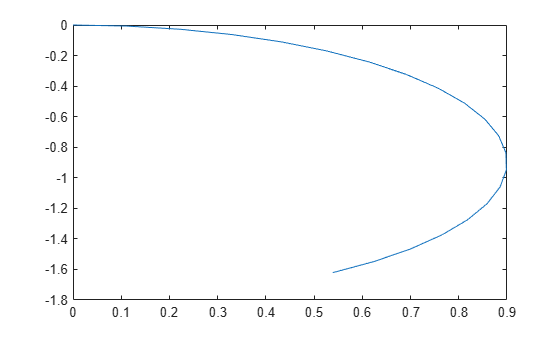
로봇 모션 시뮬레이션하기
시뮬레이션의 시간 범위를 0.05초 시간 스텝과 함께 1초로 설정하고, 입력 명령을 왼쪽 바퀴에는 50rad/s로 오른쪽 바퀴에는 40rad/s로 설정하여 우회전하도록 합니다. derivative 함수에 ode45 솔버를 사용하여 로봇의 모션을 시뮬레이션합니다.
tspan = 0:0.05:1;
inputs = [50 40]; %Left wheel is spinning faster
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);경로 플로팅하기
figure plot(y(:,1),y(:,2))
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.