unicycleKinematics
외륜 이동체 모델
설명
unicycleKinematics는 단순화된 차륜 이동체 동역학을 시뮬레이션하기 위한 외륜 이동체 모델을 만듭니다. 이동체 상태는 요소를 3개 가진 벡터 [x y theta]로 정의됩니다. 여기서 전역 xy 위치는 미터 단위로 지정되고 이동체 방향각 theta는 라디안 단위로 지정됩니다. 이 모델은 주어진 바퀴 반경 WheelRadius를 가진 외륜 이동체를 근사하며 방향각 theta에 따라 제자리에서 회전할 수 있습니다. 모델의 시간 도함수 상태를 계산하기 위해 입력 명령과 현재 로봇 상태를 지정하여 derivative 함수를 사용합니다.

생성
설명
kinematicModel = unicycleKinematics
kinematicModel = unicycleKinematics(Name,Value)
속성
객체 함수
derivative | 이동체 상태의 시간 도함수 |
예제
로봇 만들기
로봇을 정의하고 초기 시작 위치와 방향을 설정합니다.
kinematicModel = unicycleKinematics; initialState = [0 0 0];
로봇 모션 시뮬레이션하기
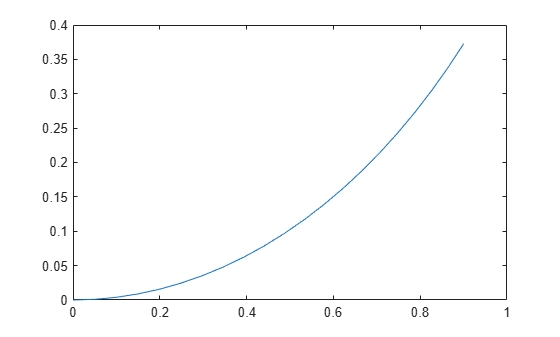
시뮬레이션의 시간 범위를 0.05 시간 스텝과 함께 1초로 설정하고, 좌회전을 위해 입력 명령을 바퀴 속도 10rad/s와 방향 각속도 pi/4rad/s로 설정합니다. derivative 함수에 ode45 솔버를 사용하여 로봇의 모션을 시뮬레이션합니다.
tspan = 0:0.05:1;
inputs = [10 pi/4]; %Constant speed and turning left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);경로 플로팅하기
figure plot(y(:,1),y(:,2))
참고 문헌
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.