minres
Solve system of linear equations — minimum residual method
Syntax
Description
x = minres(A,b)A*x = b for
x using the Minimum Residual Method. When the attempt is
successful, minres displays a message to confirm convergence. If
minres fails to converge after the maximum number of iterations or
halts for any reason, it displays a diagnostic message that includes the relative residual
norm(b-A*x)/norm(b) and the iteration number at which the method
stopped.
x = minres(A,b,tol,maxit,M)M and
computes x by effectively solving the system for y, where and . The algorithm does not form H explicitly. Using a
preconditioner matrix can improve the numerical properties of the problem and the efficiency
of the calculation.
[
returns a flag that specifies whether the algorithm successfully converged. When
x,flag] = minres(___)flag = 0, convergence was successful. You can use this output syntax
with any of the previous input argument combinations. When you specify the
flag output, minres does not display any
diagnostic messages.
Examples
Solve a square linear system using minres with default settings, and then adjust the tolerance and number of iterations used in the solution process.
Create a sparse symmetric tridiagonal matrix A as the coefficient matrix. Use the row sums of A as the vector b for the right-hand side of so that the solution is expected to be a vector of ones.
n = 400; on = ones(n,1); A = spdiags([-2*on 4*on -2*on],-1:1,n,n); b = sum(A,2);
Solve using minres. The output display includes the value of the relative residual error .
x = minres(A,b);
minres stopped at iteration 20 without converging to the desired tolerance 1e-06 because the maximum number of iterations was reached. The iterate returned (number 20) has relative residual 0.017.
By default minres uses 20 iterations and a tolerance of 1e-6, and the algorithm is unable to converge in those 20 iterations for this matrix. Since the residual is on the order of 1e-2, it is a good indicator that more iterations are needed. You also can use a larger tolerance to make it easier for the algorithm to converge.
Solve the system again using a tolerance of 1e-4 and 250 iterations.
x = minres(A,b,1e-4,250);
minres converged at iteration 200 to a solution with relative residual 7e-13.
Examine the effect of using a preconditioner matrix with minres to solve a linear system.
Create a symmetric positive definite, banded coefficient matrix.
A = delsq(numgrid('S',102));Define b so that the true solution to is a vector of all ones.
b = sum(A,2);
Set the tolerance and maximum number of iterations.
tol = 1e-12; maxit = 100;
Use minres to find a solution at the requested tolerance and number of iterations. Specify six outputs to return information about the solution process:
xis the computed solution toA*x = b.fl0is a flag indicating whether the algorithm converged.rr0is the relative residual of the computed answerx.it0is the iteration number whenxwas computed.rv0is a vector of the residual history for .rvcg0is a vector of the conjugate gradient residual history for .
[x,fl0,rr0,it0,rv0,rvcg0] = minres(A,b,tol,maxit); fl0
fl0 = 1
rr0
rr0 = 0.0013
it0
it0 = 100
fl0 is 1 because minres does not converge to the requested tolerance 1e-12 within the requested 100 iterations.
To aid with convergence, you can specify a preconditioner matrix. Since A is symmetric, use ichol to generate the preconditioner . Specify the 'ict' option to use incomplete Cholesky factorization with threshold dropping, and specify a diagonal shift value of 1e-6 to avoid nonpositive pivots. Solve the preconditioned system by specifying L and L' as inputs to minres.
setup = struct('type','ict','diagcomp',1e-6,'droptol',1e-14); L = ichol(A,setup); [x1,fl1,rr1,it1,rv1,rvcg1] = minres(A,b,tol,maxit,L,L'); fl1
fl1 = 0
rr1
rr1 = 2.6632e-15
it1
it1 = 4
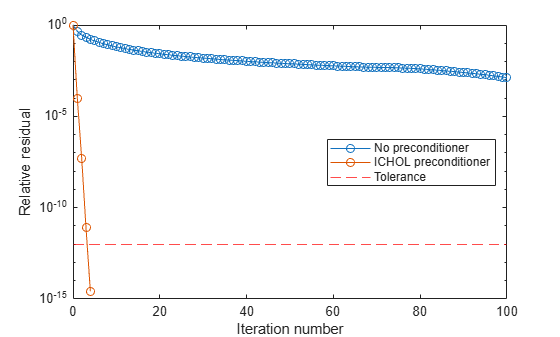
The use of an ilu preconditioner produces a relative residual less than the prescribed tolerance of 1e-12 at the fourth iteration. The output rv1(1) is norm(b), and the output rv1(end) is norm(b-A*x1).
You can follow the progress of minres by plotting the relative residuals at each iteration. Plot the residual history of each solution with a line for the specified tolerance.
semilogy(0:length(rv0)-1,rv0/norm(b),'-o') hold on semilogy(0:length(rv1)-1,rv1/norm(b),'-o') yline(tol,'r--'); legend('No preconditioner','ICHOL preconditioner','Tolerance','Location','East') xlabel('Iteration number') ylabel('Relative residual')
Examine the effect of supplying minres with an initial guess of the solution.
Create a tridiagonal sparse matrix. Use the sum of each row as the vector for the right-hand side of so that the expected solution for is a vector of ones.
n = 900; e = ones(n,1); A = spdiags([e 2*e e],-1:1,n,n); b = sum(A,2);
Use minres to solve twice: one time with the default initial guess, and one time with a good initial guess of the solution. Use 200 iterations and the default tolerance for both solutions. Specify the initial guess in the second solution as a vector with all elements equal to 0.99.
maxit = 200; x1 = minres(A,b,[],maxit);
minres converged at iteration 27 to a solution with relative residual 9.5e-07.
x0 = 0.99*e; x2 = minres(A,b,[],maxit,[],[],x0);
minres converged at iteration 7 to a solution with relative residual 6.7e-07.
In this case supplying an initial guess enables minres to converge more quickly.
Returning Intermediate Results
You also can use the initial guess to get intermediate results by calling minres in a for-loop. Each call to the solver performs a few iterations and stores the calculated solution. Then you use that solution as the initial vector for the next batch of iterations.
For example, this code performs 100 iterations four times and stores the solution vector after each pass in the for-loop:
x0 = zeros(size(A,2),1); tol = 1e-8; maxit = 100; for k = 1:4 [x,flag,relres] = minres(A,b,tol,maxit,[],[],x0); X(:,k) = x; R(k) = relres; x0 = x; end
X(:,k) is the solution vector computed at iteration k of the for-loop, and R(k) is the relative residual of that solution.
Solve a linear system by providing minres with a function handle that computes A*x in place of the coefficient matrix A.
One of the Wilkinson test matrices generated by gallery is a 21-by-21 tridiagonal matrix. Preview the matrix.
A = gallery('wilk',21)A = 21×21
10 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 9 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 8 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 7 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 6 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 5 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 4 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 3 1 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 2 1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 2 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 3 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 1 0 0 0 0 0
⋮
The Wilkinson matrix has a special structure, so you can represent the operation A*x with a function handle. When A multiplies a vector, most of the elements in the resulting vector are zeros. The nonzero elements in the result correspond with the nonzero tridiagonal elements of A. Moreover, only the main diagonal has nonzeros that are not equal to 1.
The expression becomes:
.
The resulting vector can be written as the sum of three vectors:
=.
In MATLAB®, write a function that creates these vectors and adds them together, thus giving the value of A*x:
function y = afun(x) y = [0; x(1:20)] + ... [(10:-1:0)'; (1:10)'].*x + ... [x(2:21); 0]; end
(This function is saved as a local function at the end of the example.)
Now, solve the linear system by providing minres with the function handle that calculates A*x. Use a tolerance of 1e-12 and 50 iterations.
b = ones(21,1); tol = 1e-12; maxit = 50; x1 = minres(@afun,b,tol,maxit)
minres converged at iteration 11 to a solution with relative residual 4.1e-16.
x1 = 21×1
0.0910
0.0899
0.0999
0.1109
0.1241
0.1443
0.1544
0.2383
0.1309
0.5000
0.3691
0.5000
0.1309
0.2383
0.1544
⋮
Check that afun(x1) produces a vector of ones.
afun(x1)
ans = 21×1
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
⋮
Local Functions
function y = afun(x) y = [0; x(1:20)] + ... [(10:-1:0)'; (1:10)'].*x + ... [x(2:21); 0]; end
Input Arguments
Output Arguments
More About
Tips
Convergence of most iterative methods depends on the condition number of the coefficient matrix,
cond(A). WhenAis square, you can useequilibrateto improve its condition number, and on its own this makes it easier for most iterative solvers to converge. However, usingequilibratealso leads to better quality preconditioner matrices when you subsequently factor the equilibrated matrixB = R*P*A*C.You can use matrix reordering functions such as
dissectandsymrcmto permute the rows and columns of the coefficient matrix and minimize the number of nonzeros when the coefficient matrix is factored to generate a preconditioner. This can reduce the memory and time required to subsequently solve the preconditioned linear system.
References
[1] Barrett, R., M. Berry, T. F. Chan, et al., Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, SIAM, Philadelphia, 1994.
[2] Paige, C. C. and M. A. Saunders, “Solution of Sparse Indefinite Systems of Linear Equations.” SIAM J. Numer. Anal., Vol.12, 1975, pp. 617-629.