lsqr
선형 연립방정식 풀기 — 최소제곱법
구문
설명
예제
디폴트 설정으로 lsqr을 사용하여 사각 선형 시스템을 풀고 풀이 과정에 사용된 허용오차 및 반복 횟수를 조정합니다.
50%의 밀도를 갖는 희소 형식의 확률 행렬 A를 만듭니다. 의 우변에 해당하는 확률 벡터 b도 만듭니다.
rng default
A = sprand(400,300,.5);
b = rand(400,1);lsqr을 사용하여 를 풉니다. 출력 표시에는 상대 잔차 오차 의 값이 포함됩니다.
x = lsqr(A,b);
lsqr stopped at iteration 20 without converging to the desired tolerance 1e-06 because the maximum number of iterations was reached. The iterate returned (number 20) has relative residual 0.26.
기본적으로 lsqr은 20회 반복과 1e-6의 허용오차를 사용하지만 이 알고리즘으로는 이 행렬에 대해 20회의 반복 내에 수렴할 수 없습니다. 잔차는 아직 큽니다. 이는 더 많은 반복(또는 선조건자 행렬)이 필요함을 알려줍니다. 알고리즘이 쉽게 수렴할 수 있도록 큰 허용오차를 사용할 수도 있습니다.
1e-4의 허용오차와 70회의 반복으로 시스템을 다시 풉니다. 계산된 해의 상대 잔차 relres, 잔차 내역 resvec 및 최소제곱 잔차 내역 lsvec를 반환하도록 6개의 출력값을 지정합니다.
[x,flag,relres,iter,resvec,lsvec] = lsqr(A,b,1e-4,70); flag
flag = 0
flag가 0이므로 알고리즘은 지정된 반복 횟수 내에 기대한 허용오차를 충족할 수 있었습니다. 이 방식으로 허용오차와 반복 횟수를 함께 조정하여 속도와 정밀도 간의 상호 절충 관계를 조정할 수 있습니다.
계산된 해의 상대 잔차와 최소제곱 잔차를 검토합니다.
relres
relres = 0.2625
lsres = lsvec(end)
lsres = 2.7640e-04
잔차 노름을 보면 relres가 지정된 허용오차 1e-4보다 작지 않으므로 x가 최소제곱해임을 알 수 있습니다. 선형 시스템의 모순 없는 해가 존재하지 않으므로 솔버가 할 수 있는 최선은 최소제곱 잔차가 허용오차를 충족하도록 하는 것입니다.
잔차 내역을 플로팅합니다. 상대 잔차 resvec는 빠르게 최솟값에 도달하고 이후 진전이 없는 반면 최소제곱 잔차 lsvec는 후속 반복에서 계속해서 최소화됩니다.
N = length(resvec); semilogy(0:N-1,lsvec,'--o',0:N-1,resvec,'-o') legend("Least-squares residual","Relative residual")

lsqr에 선조건자 행렬을 사용하여 선형 시스템을 푸는 효과를 검토합니다.
479×479 실수 비대칭 희소 행렬인 west0479를 불러옵니다.
load west0479
A = west0479;의 참(True) 해가 1로만 구성된 벡터가 되도록 b를 정의합니다.
b = sum(A,2);
허용오차와 최대 반복 횟수를 설정합니다.
tol = 1e-12; maxit = 20;
lsqr을 사용하여 요청된 허용오차와 반복 횟수로 해를 구합니다. 풀이 과정에 대한 정보를 반환하는 6개의 출력값을 지정합니다.
x는A*x = b의 계산된 해입니다.fl은 알고리즘의 수렴 여부를 나타내는 플래그입니다.rr은 계산된 답x의 상대 잔차입니다.it는x가 계산된 반복 횟수입니다.rv는 의 잔차 내역으로 구성된 벡터입니다.lsrv는 최소제곱 잔차 내역으로 구성된 벡터입니다.
[x,fl,rr,it,rv,lsrv] = lsqr(A,b,tol,maxit); fl
fl = 1
rr
rr = 0.0017
it
it = 20
fl = 1이므로 알고리즘이 최대 반복 횟수 내에 지정된 허용오차로 수렴하지 않았습니다.
이러한 느린 수렴을 개선할 수 있도록 선조건자 행렬을 지정할 수 있습니다. A는 비대칭 행렬이므로 ilu를 사용하여 선조건자 를 분해된 형식으로 생성합니다. 대각선상에 있지 않으면서 값이 1e-6보다 작은 요소는 무시하도록 기각 허용오차를 지정합니다. L과 U를 lsqr에 대한 M1 입력값과 M2 입력값으로 지정하여 선조건이 적용된 시스템 를 에 대해 풉니다.
setup = struct('type','ilutp','droptol',1e-6); [L,U] = ilu(A,setup); [x1,fl1,rr1,it1,rv1,lsrv1] = lsqr(A,b,tol,maxit,L,U); fl1
fl1 = 0
rr1
rr1 = 7.0954e-14
it1
it1 = 13
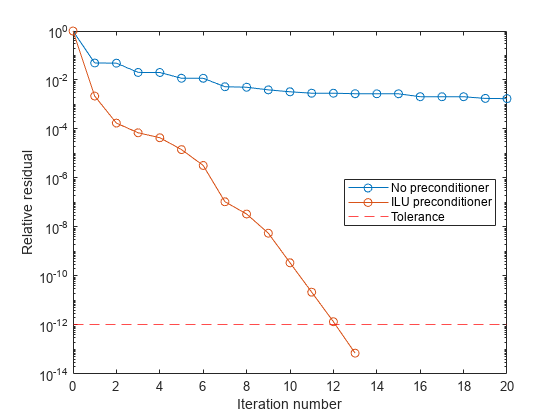
ilu 선조건자를 사용한 결과 13번째 반복에서 미리 정해진 허용오차 1e-12보다 작은 상대 잔차가 생성됩니다. 출력값 rv1(1)은 norm(b)가 되고, 출력값 rv1(end)는 norm(b-A*x1)이 됩니다.
각 반복마다 상대 잔차를 플로팅하면 lsqr의 진행률을 추적할 수 있습니다. 각 해의 잔차 내역을 플로팅하고, 지정된 허용오차에 대한 선을 추가합니다.
semilogy(0:length(rv)-1,rv/norm(b),'-o') hold on semilogy(0:length(rv1)-1,rv1/norm(b),'-o') yline(tol,'r--'); legend('No preconditioner','ILU preconditioner','Tolerance','Location','East') xlabel('Iteration number') ylabel('Relative residual')
lsqr에 해의 초기 추측값을 제공하는 효과를 검토합니다.
희소 형식의 확률 사각 행렬을 만듭니다. 의 예상 해가 1로 구성된 벡터가 되도록 각 행의 합을 의 우변에 대한 벡터로 사용합니다.
A = sprand(700,900,0.1); b = sum(A,2);
lsqr을 사용하여 를 두 번 풉니다. 한 번은 디폴트 초기 추측값을 사용하여 풀고, 다른 한 번은 해에 대한 양호한 초기 추측값을 사용하여 풉니다. 두 해 모두에 대해 75회의 반복과 디폴트 허용오차를 사용합니다. 두 번째 해의 초기 추측값을 모든 요소가 0.99인 벡터로 지정합니다.
maxit = 75; x1 = lsqr(A,b,[],maxit);
lsqr converged at iteration 64 to a solution with relative residual 8.7e-07.
x0 = 0.99*ones(size(A,2),1); x2 = lsqr(A,b,[],maxit,[],[],x0);
lsqr converged at iteration 26 to a solution with relative residual 9.6e-07.
예상 해에 가까운 초기 추측값을 사용하면 lsqr이 더 적은 반복 내에 수렴할 수 있습니다.
중간 결과 반환하기
for 루프에서 lsqr을 호출하여 중간 결과를 얻는 데도 초기 추측값을 사용할 수 있습니다. 솔버에 대한 각 호출은 몇 회의 반복을 수행한 후 계산된 해를 저장합니다. 그런 다음 저장된 해를 다음 반복 배치의 초기 벡터로 사용합니다.
예를 들어, 다음 코드는 100회의 반복을 4번 수행하며, for 루프를 통과한 후 매번 해 벡터를 저장합니다.
x0 = zeros(size(A,2),1); tol = 1e-8; maxit = 100; for k = 1:4 [x,flag,relres] = lsqr(A,b,tol,maxit,[],[],x0); X(:,k) = x; R(k) = relres; x0 = x; end
X(:,k)는 for 루프의 반복 k회에서 계산된 해 벡터이고, R(k)는 이 해의 상대 잔차입니다.
lsqr에 계수 행렬 A 대신 A*x와 A'*x를 계산하는 함수 핸들을 제공하여 선형 시스템을 풉니다.
비대칭 삼중대각 행렬 행렬을 만듭니다. 행렬을 미리 봅니다.
A = gallery('wilk',21) + diag(ones(20,1),1)A = 21×21
10 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 9 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 8 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 7 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 6 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 5 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 4 2 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 3 2 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 2 2 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 2 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 2 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 1 2 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 2 2 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 3 2 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 2 0 0 0 0 0
⋮
이 삼중대각 행렬은 특수한 구조를 갖고 있으므로 연산 A*x를 함수 핸들로 나타낼 수 있습니다. A에 벡터를 곱할 때 결과 벡터의 대부분의 요소는 0입니다. 결과에 있는 0이 아닌 요소는 A의 0이 아닌 삼중대각선 요소에 해당합니다.
표현식 는 다음과 같이 표현됩니다.
.
결과 벡터는 다음과 같이 세 벡터의 합으로 작성할 수 있습니다.
=.
마찬가지로, 표현식 는 다음과 같이 표현됩니다.
.
.
MATLAB®에서 이러한 벡터를 만들어서 더하여 플래그 입력값에 따라 A*x 또는 A'*x의 값을 제공하는 함수를 작성합니다.
function y = afun(x,flag) if strcmp(flag,'notransp') % Compute A*x y = [0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + 2*[x(2:end); 0]; elseif strcmp(flag,'transp') % Compute A'*x y = 2*[0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + [x(2:end); 0]; end end
(이 함수는 예제 끝에 로컬 함수로 저장되어 있습니다.)
이제 A*x와 A'*x를 계산하는 함수 핸들을 lsqr에 제공하여 선형 시스템 를 풉니다. 허용오차 1e-6 및 25회 반복을 사용합니다. 의 참(True) 해가 1로 구성된 벡터가 되도록 를 의 행 합으로 지정합니다.
b = full(sum(A,2)); tol = 1e-6; maxit = 25; x1 = lsqr(@afun,b,tol,maxit)
lsqr converged at iteration 21 to a solution with relative residual 5.4e-13.
x1 = 21×1
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
⋮
로컬 함수
function y = afun(x,flag) if strcmp(flag,'notransp') % Compute A*x y = [0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + 2*[x(2:end); 0]; elseif strcmp(flag,'transp') % Compute A'*x y = 2*[0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + [x(2:end); 0]; end end
입력 인수
출력 인수
세부 정보
팁
대부분의 반복법의 수렴 여부는 계수 행렬의 조건수
cond(A)에 따라 결정됩니다.A가 정사각 행렬인 경우equilibrate를 사용하여 이 행렬의 조건수를 개선할 수 있으며, 이로 인해 대부분의 반복 솔버의 수렴이 보다 쉬워집니다.equilibrate를 사용하면 이후 equilibrate가 적용된 행렬B = R*P*A*C를 분해할 때 더 나은 품질의 선조건자 행렬을 만들 수도 있습니다.계수 행렬을 인수 분해할 때
dissect및symrcm과 같은 행렬 재정렬 함수를 사용하여 계수 행렬의 행과 열을 치환하고 0이 아닌 요소의 개수를 최소화하여 선조건자를 생성할 수 있습니다. 이렇게 하면 이후 선조건이 적용된 선형 시스템을 푸는 데 필요한 메모리와 시간을 절약할 수 있습니다.
참고 문헌
[1] Barrett, R., M. Berry, T. F. Chan, et al., Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, SIAM, Philadelphia, 1994.
[2] Paige, C. C. and M. A. Saunders, "LSQR: An Algorithm for Sparse Linear Equations And Sparse Least Squares," ACM Trans. Math. Soft., Vol.8, 1982, pp. 43-71.