이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
라이다 뷰어
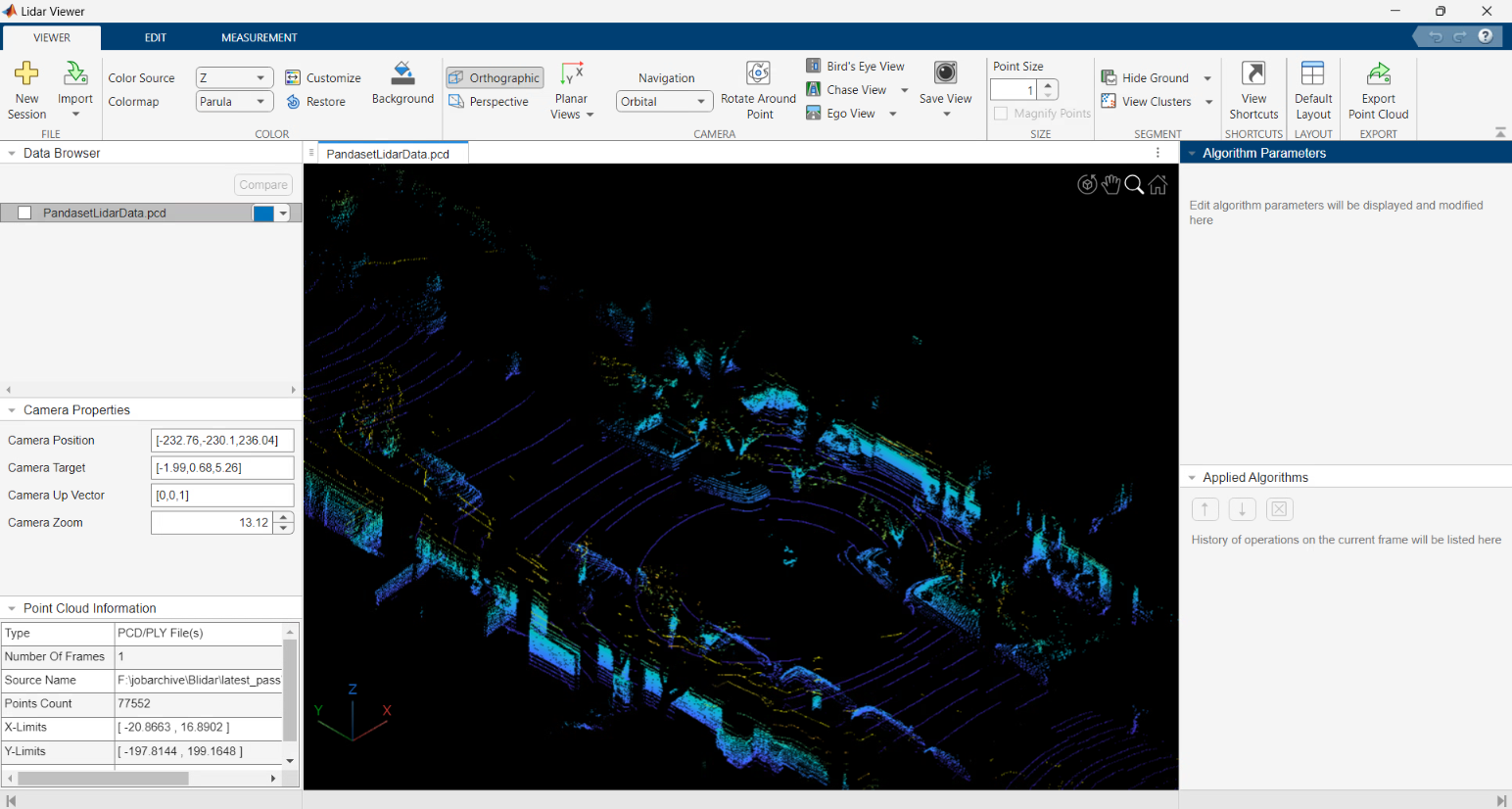
라이다 데이터 시각화 및 분석
R2021b 이후
설명
라이다 뷰어 앱을 사용하여 포인트 클라우드 데이터를 시각화, 분석, 전처리할 수 있습니다. 이 앱은 다음 기능을 제공합니다.
포인트 클라우드 데이터를 불러오고 시각화합니다. 이 앱은 작업 공간에서
pointCloud객체를 가져오고 PLY 파일, PCAP 파일, LAS 파일, LAZ 파일, PCD 파일, E57 파일, rosbag 파일 또는 사용자 지정 소스에서 포인트 클라우드 데이터를 읽어옵니다. 처리된 포인트 클라우드를 PCD 파일, PLY 파일, LAS 파일 또는 LAZ 파일로 내보낼 수 있습니다.거리, 고도, 위치, 부피와 같은 포인트 클라우드 특성을 측정합니다.
내장 카메라 뷰, 컬러맵, 군집화 옵션을 사용하여 포인트 클라우드 데이터를 표시하고 분석합니다. 또한 사용자 지정 카메라 뷰를 만들고 저장할 수 있습니다.
내장 전처리 알고리즘을 사용하여 포인트 클라우드 데이터에서 잡음 제거, 다운샘플링, 필터링, 자르기, 지면 제거를 수행합니다.
사용자 지정 전처리 알고리즘을 생성하고 가져와서 포인트 클라우드를 편집합니다. 또한 사용자 인터페이스를 만들어 대화형 방식으로 알고리즘 파라미터를 조정할 수 있습니다.
포인트 클라우드에서 수행된 전처리 작업을 MATLAB® 함수로 내보내어 재사용합니다.
오버레이를 사용하여 둘 이상의 포인트 클라우드를 비교하고 포인트 클라우드 간에 점에서 점으로의 메트릭과 점에서 평면으로의 메트릭을 계산합니다.
라이다 뷰어 앱 열기
MATLAB 툴스트립: 앱 탭의 영상 처리 및 컴퓨터 비전 섹션에서 앱 아이콘을 클릭합니다.
MATLAB 명령 창:
lidarViewer를 입력합니다. 그러면 라이다 뷰어 앱의 새 세션이 열립니다.
버전 내역
R2021b에 개발됨
참고 항목
앱
함수
pcshow|pointCloud|pcdownsample|pcmedian|pcdenoise|pcorganize|segmentGroundSMRF|pcfitplane|segmentGroundFromLidarData