시각화 및 분석
theaterPlot을 사용하여 ground truth, 커버리지, 검출, 트랙을 플로팅합니다. trackErrorMetrics를 사용하여 트랙에 대한 오차 메트릭을 구합니다. trackAssignmentMetrics, trackOSPAMetric, trackGOSPAMetric을 사용하여 다중 객체 추적 시스템의 성능을 분석하고 비교합니다.
함수
블록
도움말 항목
- Configure Time Scope MATLAB Object
Customize
timescopeproperties and use measurement tools.
추천 예제
Introduction to Tracking Metrics
While designing a multi-object tracking system, it is essential to devise a method to evaluate its performance against the available ground truth. This ground truth is typically available from a simulation environment or by using techniques like ground-truth extraction using manual or automated labeling on recorded data. Though it is possible to qualitatively evaluate a tracking algorithm using visualization tools, the approach is usually not scalable. This example introduces different quantitative analysis tools in Sensor Fusion and Tracking Toolbox™ for assessing a tracker's performance. You will also use some common events like false tracks, track swaps etc. encountered while tracking multiple objects to understand the strengths and limitations of these tools.
Use theaterPlot to Visualize Tracking Scenario
Use the theaterPlot object to visualize various aspects of a tracking scenario.
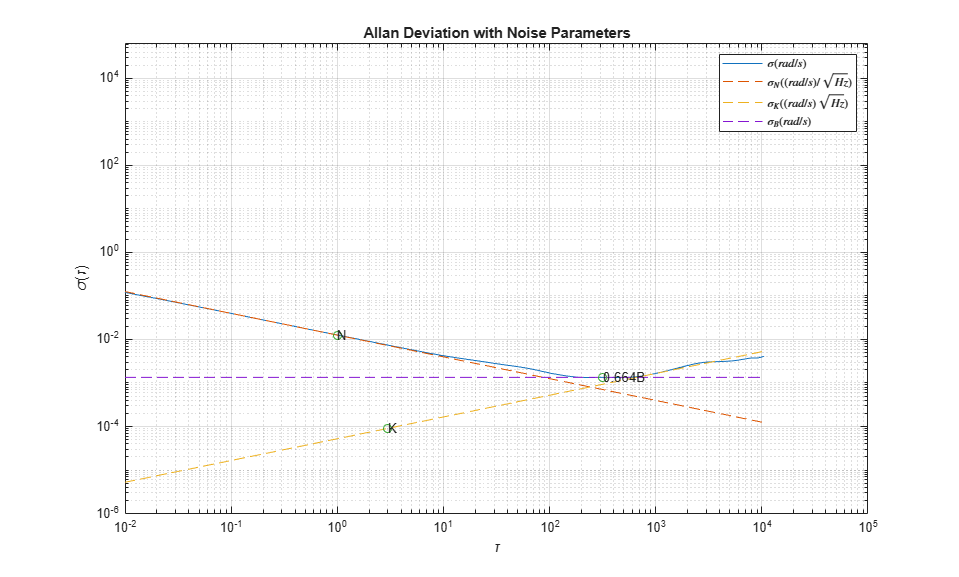
Allan 분산을 사용하여 관성 센서 잡음 분석
이 예제에서는 Allan 분산을 사용하여 MEMS 자이로스코프의 잡음 파라미터를 확인하는 방법을 보여줍니다. 이러한 파라미터는 시뮬레이션에서 자이로스코프를 모델링하는 데 사용할 수 있습니다. 자이로스코프 측정은 다음으로 모델링됩니다.
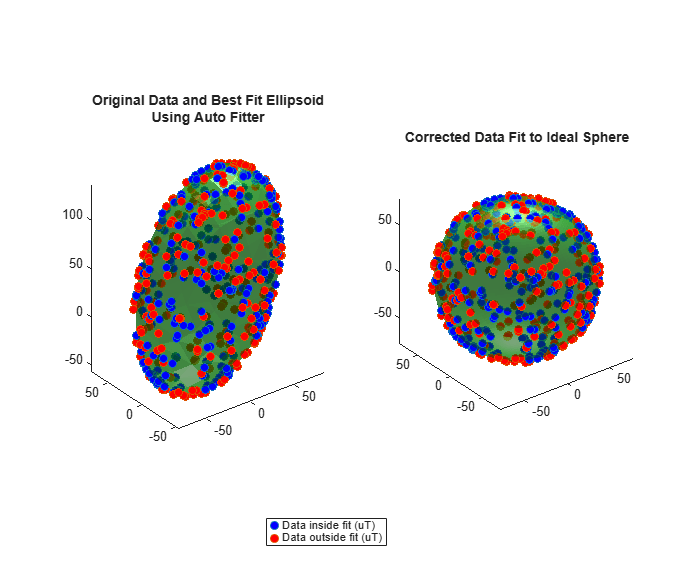
Magnetometer Calibration
Magnetometers detect magnetic field strength along a sensor's X,Y and Z axes. Accurate magnetic field measurements are essential for sensor fusion and the determination of heading and orientation.