프로그래밍 방식 시나리오 작성
drivingScenario 객체를 사용하여 프로그래밍 방식으로 주행 시나리오 생성drivingScenario 객체를 사용하면 MATLAB® 명령줄에서 주행 시나리오를 작성할 수 있습니다. 이 객체를 사용하여 복잡한 도로망이나 주차장을 설계하고 액터와 그 궤적을 지정합니다. 그런 다음 센서 모델을 사용하여 이러한 시나리오에서 합성 데이터를 생성하고 이 데이터를 조감도 플롯에 시각화할 수 있습니다.
drivingScenario 객체의 유연한 인터페이스를 통해 시나리오의 변형을 생성하여 주행 알고리즘을 다양한 조건에서 신속하게 테스트할 수 있습니다. 자세한 내용은 Create Driving Scenario Variations Programmatically 항목을 참조하십시오.
함수
도움말 항목
주행 시나리오
- 프로그래밍 방식으로 주행 시나리오 만들기
합성 센서 데이터 및 추적 알고리즘의 ground truth 주행 시나리오를 프로그래밍 방식으로 생성합니다. - Define Road Layouts Programmatically
Programmatically create road junctions and combine these junctions to create more complicated road networks. - Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario. - Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario. - Create Driving Scenario Variations Programmatically
Programmatically create variations of a driving scenario that was built using the Driving Scenario Designer app. - Visualize Sensor Coverage, Detections, and Tracks
Configure and use a bird's-eye plot to display sensor coverage, detections, and tracking results around the ego vehicle. - Automate Control of Intelligent Vehicles by Using Stateflow Charts
Model a highway scenario with intelligent vehicles that are controlled by decision logic defined by a Stateflow® chart.
센서
- Model Radar Sensor Detections
Model and simulate the output of an automotive radar sensor for various driving scenarios. - Radar Signal Simulation and Processing for Automated Driving
Model the hardware, signal processing, and propagation environment of a radar for a driving scenario. - Simulate Radar Ghosts Due to Multipath Return
Generate ghost targets that occur when signal energy is reflected off another target before returning to the radar. - Model Vision Sensor Detections
Model and simulate the output of an automotive vision sensor for various driving scenarios. - Simulate Inertial Sensor Readings from a Driving Scenario (Navigation Toolbox)
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
추천 예제
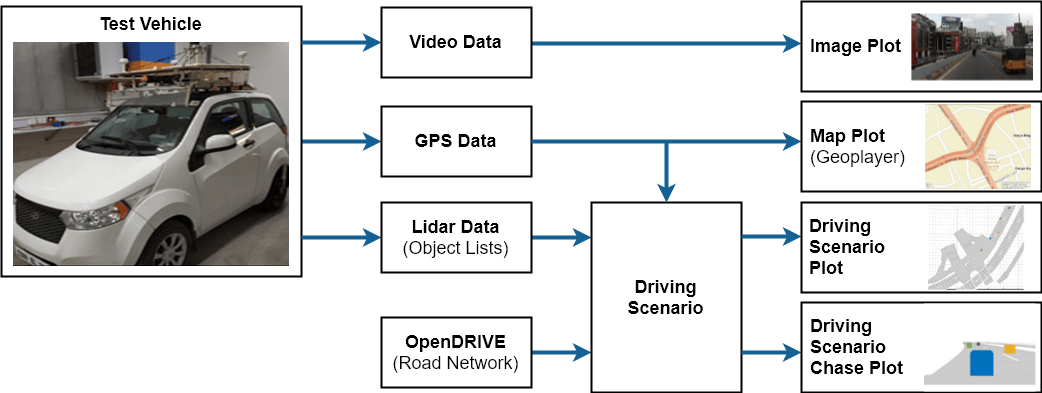
Scenario Generation from Recorded Vehicle Data
Automatically generate virtual driving scenarios from recorded vehicle data.
Automatic Scenario Generation
Automate scenario generation by using a drivingScenario object. In this example, you will automate:

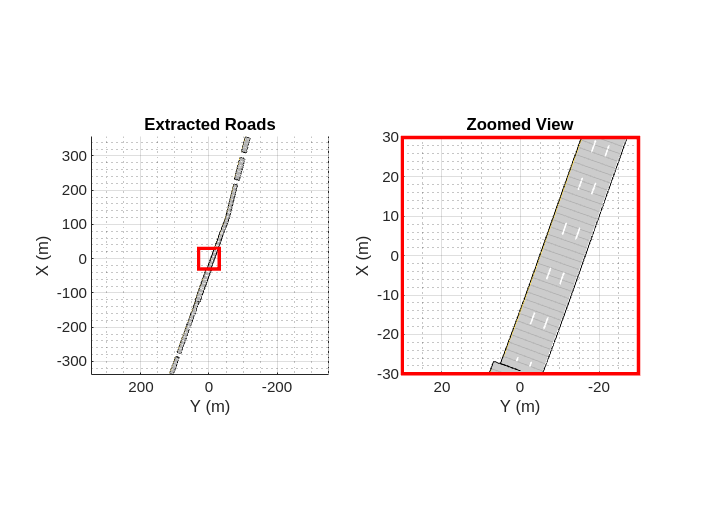
Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.
Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data.

Generate Scenario Variants for Testing AEB Pedestrian Systems
Generate scenario variants to test automated emergency braking (AEB) system using car-to-pedestrian European New Car Assessment Programme (Euro NCAP) test scenario.