pade
시간 지연이 있는 모델의 파데 근사
설명
pade는 연속시간 LTI 모델의 시간 지연을 근사합니다. 이러한 근사는 연속시간 시스템이라는 맥락에서 전송 및 계산 지연과 같은 시간 지연 효과를 모델링하는 데 유용합니다. 시간 지연 T초의 라플라스 변환은 (–sT)입니다. 이 지수 전달 함수는 [1]의 파데 근사식을 사용하여 유리 전달 함수로 근사됩니다.
이산시간 모델을 근사하려면 absorbDelay를 사용하십시오.
시간 지연이 있는 모델에 대한 자세한 내용은 선형 시스템의 시간 지연 항목을 참조하십시오.
예제
이 예제에서는 2차 시스템의 1.8초 시간 지연에 대해 지연 없는 분자 계수와 분모 계수를 계산합니다.
T = 1.8; N = 2; [num,den] = pade(T,N)
num = 1×3
1.0000 -3.3333 3.7037
den = 1×3
1.0000 3.3333 3.7037
또한 지연 없는 근사와 시간 지연이 있는 원래 시스템의 계단 응답과 위상 응답을 플로팅할 수 있습니다. pade 명령을 출력 인수 없이 사용하여 비교 플롯을 생성합니다.
pade(T,N)

이 예제에서는 다음 연속시간 개루프 시스템의 파데 근사를 구합니다.
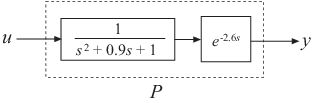
출력 지연이 있는 개루프 시스템을 만듭니다.
s = tf('s');
T = 2.6;
sys = exp(-T*s)/(s^2+0.9*s+1)sys =
1
exp(-2.6*s) * ---------------
s^2 + 0.9 s + 1
Continuous-time transfer function.
Model Properties
sys는 시간 지연이 있는 2차 전달 함수(tf) 객체입니다.
다음으로, sys의 1차 파데 근사를 계산합니다.
sysx = pade(sys,1)
sysx =
-s + 0.7692
----------------------------------
s^3 + 1.669 s^2 + 1.692 s + 0.7692
Continuous-time transfer function.
Model Properties
pade는 sys의 모든 시간 지연을 1차 근사로 바꿉니다. 따라서 sysx는 지연 없는 3차 전달 함수입니다.
또한 지연 없는 근사 모델과 시간 지연이 있는 모델의 계단 응답과 위상 응답을 플로팅하고 비교할 수 있습니다. 시간 지연 값과 차수 값을 사용하여 플롯을 만듭니다.
pade(T,1)

0.1초의 I/O 지연으로 3차 파데 근사를 계산합니다.
s = tf('s');
sys = exp(-0.1*s);
sysx = pade(sys,3)sysx = -s^3 + 120 s^2 - 6000 s + 1.2e05 -------------------------------- s^3 + 120 s^2 + 6000 s + 1.2e05 Continuous-time transfer function. Model Properties
여기서 sys는 정확한 시간 지연 0.1초의 동적 시스템 표현입니다. sysx는 지연을 근사하는 전달 함수입니다.
실제 지연과 그 근사의 시간 및 주파수 응답을 비교합니다. pade 명령을 출력 인수 없이 호출하면 비교 플롯이 생성됩니다. 여기서 pade의 첫 번째 인수는 시간 지연을 나타내는 동적 시스템이 아니라 정확한 시간 지연의 크기입니다.
pade(0.1,3)

이 예제에서는 ssModel.mat에 포함된 MIMO 상태공간 모델 sys가 있다고 가정하겠습니다. sys는 2개의 입력과 3개의 출력을 가지며 입력 지연, 출력 지연, 내부 지연을 포함합니다.
데이터를 불러와서 sys를 살펴봅니다.
load('ssModel.mat','sys') sys
sys =
A =
x1 x2
x1 2.893 1.497
x2 -0.1138 -0.5279
B =
u1 u2
x1 -1.334 -4.155
x2 1.127 -0.06161
C =
x1 x2
y1 -2.416 -0.6317
y2 1.688 1.063
y3 3.509 1.84
D =
u1 u2
y1 1.019 1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 1.5 0.3
Output delays (seconds): 0.2 0.8 1.3
Internal delays (seconds): 2.1 1.3
Continuous-time state-space model.
Model Properties
입력 지연, 출력 지연, 내부 지연에 대한 근사 차수를 지정하고 파데 근사를 계산합니다. 해당 지연의 근사를 방지하려면 근사 차수를 Inf로 설정합니다.
NU = [3 Inf]; NY = [1 Inf 2]; NINT = [Inf 2]; sysx = pade(sys,NU,NY,NINT)
sysx =
A =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
x1 -10 0 0 -9.665 -2.527 -7.305 0 16.3 0 4.527
x2 0 -4.615 -3.55 14.04 7.358 21.51 0 0 0 0
x3 0 2 0 0 0 0 0 0 0 0
x4 0 0 0 2.893 1.497 4.115 0 -5.335 0 -1.482
x5 0 0 0 -0.1138 -0.5279 -0.2169 0 4.51 0 1.253
x6 0 0 0 -8.011 -3.193 -4.615 -3.55 0 0 0
x7 0 0 0 0 0 2 0 0 0 0
x8 0 0 0 0 0 0 0 -8 -6.667 -2.222
x9 0 0 0 0 0 0 0 4 0 0
x10 0 0 0 0 0 0 0 0 4 0
B =
u1 u2
x1 -4.075 7.996
x2 0 -23.54
x3 0 0
x4 1.334 -4.155
x5 -1.127 -0.06161
x6 0 10.1
x7 0 0
x8 4 0
x9 0 0
x10 0 0
C =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
y1 5 0 0 2.416 0.6317 1.826 0 -4.075 0 -1.132
y2 0 0 0 1.688 1.063 3.074 0 0 0 0
y3 0 -2.308 0 3.509 1.84 5.377 0 0 0 0
D =
u1 u2
y1 1.019 -1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 0 0.3
Output delays (seconds): 0 0.8 0
Internal delays (seconds): 2.1
Continuous-time state-space model.
Model Properties
그 결과로 얻은 근사 sysx에는 여전히 특정 입력 지연, 출력 지연, 내부 지연이 있으며 여기서 해당 근사 차수는 Inf입니다.
입력 인수
출력 인수
제한 사항
파데 근사는 낮은 주파수에서만 유효하며 시간 영역 근사보다 더 나은 주파수 영역 근사를 제공합니다. 따라서 실제 응답과 근사 응답을 비교하여 올바른 근사 차수를 선택하고 근사의 유효성을 검사하십시오.
고차 파데 근사는 군집화된 극점을 갖는 전달 함수를 생성합니다. 이러한 극점 구성은 섭동에 매우 민감하기 마련이므로, 차수가
N>10인 파데 근사는 피하십시오.
참고 문헌
[1] Golub, Gene H., and Charles F. Van Loan. Matrix Computations. 2nd ed. Johns Hopkins Series in the Mathematical Sciences 3. Baltimore, Md: Johns Hopkins University Press, 1989. pp. 557-558.
버전 내역
R2006a 이전에 개발됨