initial
상태공간 모델의 초기 상태에 대한 시스템 응답
구문
설명
상태공간 모델 및 희소 상태공간 모델의 경우 initial은 초기 상태 xinit에 대한 비강제 시스템 응답 y를 계산합니다.
연속시간:
이산시간:
이는 u(t)가 오프셋 값 u0에서 유지될 때의 시스템 응답입니다.
선형 시변 또는 선형 파라미터 가변 상태공간 모델의 경우 initial은 초기 상태 xinit, 초기 파라미터 pinit(LPV 모델), 그리고 오프셋 값(u(t) = u0(t) 또는 u(t) = u0(t,p))으로 유지되는 입력을 사용하여 응답을 계산하며, 이는 국소 선형 동특성의 초기 조건 응답에 해당합니다.
initial(___)은 위에 열거된 모든 입력 인수의 조합에 디폴트 플로팅 옵션을 사용하여 sys의 초기 상태 응답을 플로팅합니다. 추가 플롯 사용자 지정 옵션이 필요하면 initialplot을 사용하십시오.
여러 동적 시스템의 응답을 동일한 플롯에 플로팅하려면
sys를 쉼표로 구분된 모델 목록으로 지정할 수 있습니다. 예를 들어,initial(sys1,sys2,sys3)은 세 모델의 응답을 동일한 플롯에 플로팅합니다.플롯에 있는 각 시스템의 색, 선 스타일 및 마커를 지정하려면 각 시스템의
LineSpec값을 지정합니다. 예를 들어,initial(sys1,LineSpec1,sys2,LineSpec2)는 두 모델을 플로팅하고 각각의 플롯 스타일을 지정합니다.LineSpec값 지정에 대한 자세한 내용은initialplot항목을 참조하십시오.
예제
이 예제에서는 5개의 상태를 갖는 무작위 상태공간 모델을 생성하고 초기 상태에 대한 시스템의 응답 플롯을 만듭니다.
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
initial(sys,x0)
다음 상태공간 모델의 응답을 플로팅합니다.
다음 초기 조건을 사용합니다.
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); initial(sys,x0)
다음과 같은 2-입력 2-출력 동적 시스템이 있다고 가정하겠습니다.
초기 조건 응답 플롯이 상태공간 모델에만 지원되므로, sys를 상태공간 형식으로 변환합니다.
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
결과로 얻은 상태공간 모델에는 4개의 상태가 있습니다. 따라서 요소를 4개 가진 초기 조건 벡터를 제공합니다.
x0 = [0.3,0.25,1,4];
초기 조건 응답 플롯을 만듭니다.
initial(sys,x0);

결과로 얻은 플롯에 sys의 출력당 하나씩 총 두 개의 서브플롯이 포함되어 있습니다.
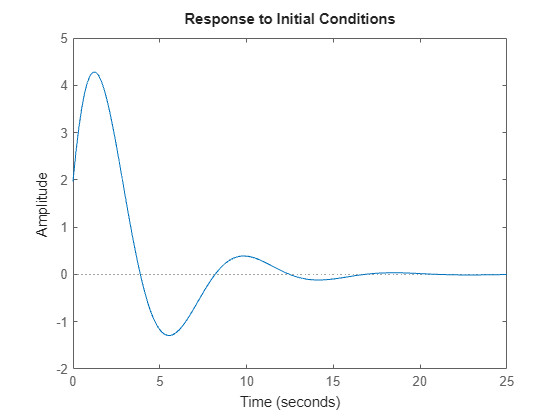
이 예제에서는 다음 영점-극점-이득 모델의 초기 조건 응답을 검토하고 플롯을 tFinal = 15초로 제한합니다.
먼저, initial은 상태공간 모델만 지원하므로 zpk 모델을 ss 모델로 변환합니다.
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
이제 초기 조건 응답 플롯을 만듭니다.
initial(sys,x0,tFinal);

이 예제에서는 3개 동적 시스템의 초기 조건 응답을 플로팅합니다.
먼저 3개 모델을 만들고 초기 조건을 제공합니다. 모든 모델의 상태 개수는 동일해야 합니다.
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];5초 범위의 시간 벡터 t를 사용하여 3개 모델의 초기 조건 응답을 플로팅합니다.
t = 0:0.1:5; initial(sys1,'r--',sys2,'b',sys3,'g-.',x0,t)

2개의 상태를 갖는 다음 상태공간 모델의 초기 조건 응답 데이터를 추출합니다.
다음 초기 조건을 사용합니다.
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); [y,tOut,x] = initial(sys,x0);
배열 y는 행 수와 열 수가 각각 시간 샘플(tOut의 길이) 개수 및 출력 개수와 같습니다. 이와 유사하게, x는 행 수와 열 수가 각각 시간 샘플(tOut의 길이) 개수 및 상태 개수와 같습니다.
이 예제에서는 상태 6개, 출력 3개, 입력 2개인 상태공간 모델의 초기 조건 응답 데이터를 추출하겠습니다.
먼저, 모델을 만들고 초기 조건을 제공합니다.
rng('default');
sys = rss(6,3,2);
x0 = [0.1,0.3,0.05,0.4,0.75,1];15초 범위의 시간 벡터 t를 사용하여 모델의 초기 조건 응답을 추출합니다.
t = 0:0.1:15; [y,tOut,x] = initial(sys,x0,t);
배열 y는 행 수와 열 수가 각각 시간 샘플(tOut의 길이) 개수 및 출력 개수와 같습니다. 이와 유사하게, x는 행 수와 열 수가 각각 시간 샘플(tOut의 길이) 개수 및 상태 개수와 같습니다.
이 예제에서 throttleLPV.m은 15도 ~ 90도의 열림 범위에서 선형으로 동작하는 비선형 엔진 스로틀의 동특성을 정의합니다.
lpvss를 사용하여 모델을 만듭니다. 이 모델은 모델의 첫 번째 상태인 스로틀 각도로 파라미터화됩니다.
c0 = 50;
k0 = 120;
K0 = 1e4;
b0 = 4e4;
yf = 15*K0/(k0+K0);
Ts = 0;
sys = lpvss("x1",@(t,p) throttleLPV(p,c0,k0,b0,K0),Ts,0,15);궤적 를 따라 이 모델의 초기 응답을 계산할 수 있습니다.
선형 범위의 하한에서 작은 각속도로 시작할 경우의 응답을 계산합니다. 파라미터 궤적을 지정하고, findop를 사용하여 초기 조건을 구합니다.
pFcn = @(t,x,u)x(1); xinit = [15;10]; pinit = xinit(1); t = linspace(0,0.6,500); ic = findop(sys,t(1),pinit,x=xinit); y = initial(sys,ic,t,pFcn); plot(t,y)

선형 범위의 하한에서 이 범위의 상한에 도달할 만큼 충분한 각속도로 시작할 경우의 응답을 계산합니다.
xinit2 = [15;5e3]; pinit2 = xinit2(1); t2 = linspace(0,1,1000); ic2 = findop(sys,t2(1),pinit2,x=xinit2); y2 = initial(sys,ic2,t2,pFcn); plot(t2,y2)

데이터 함수를 봅니다.
type throttleLPV.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = throttleLPV(x1,c,k,b,K) % LPV representation of engine throttle dynamics. % Ref: https://www.mathworks.com/help/sldo/ug/estimate-model-parameter-values-gui.html % x1: scheduling parameter (throttle angle; first state of the model) % c,k,b,K: physical parameters A = [0 1; -k -c]; B = [0; b]; C = [1 0]; D = 0; E = []; Delays = []; x0 = []; u0 = []; y0 = []; % Nonlinear displacement value NLx = max(90,x1(1))-90+min(x1(1),15)-15; % Capture the nonlinear contribution as a state-derivative offset dx0 = [0;-K*NLx];
복소 계수를 갖는 상태공간 모델을 만듭니다.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
임의의 시작 상태에 대한 시스템의 초기 조건 응답을 계산합니다.
ic = [1 2]; [y,t] = initial(sys,ic);
결과로 얻은 응답 데이터에 복소수 출력값이 포함되어 있습니다.
y
입력 인수
출력 인수
팁
플롯 사용자 지정 옵션이 추가로 필요하면 대신
initialplot을 사용하십시오.initial을 사용하여 생성된 플롯은 string형 배열이나 문자형 벡터로 구성된 셀형 배열을 사용해서 여러 줄로 된 제목이나 레이블을 지정하는 것을 지원하지 않습니다. 여러 줄로 된 제목과 레이블을 지정하려면newline문자가 포함된 단일 문자열을 사용하십시오.initial(sys) title("first line" + newline + "second line");
버전 내역
R2006a 이전에 개발됨참고 항목
initialplot | impulse | lsim | 선형 시스템 분석기 | step