initialplot
Plot initial condition response of dynamic system
Syntax
Description
The initialplot function plots the initial condition response
of a dynamic system
model. To customize the plot,
you can return an InitialPlot object and modify it using dot notation. For
more information, see Customize Linear Analysis Plots at Command Line.
To obtain initial condition response data, use the initial function.
initialplot(
plots the initial condition response of dynamic system sys,IC)sys.
If sys is a multi-input, multi-output (MIMO) model, then the
initialplot function creates a grid of plots with each plot displaying
the initial condition response of one input-output pair.
If sys is a model with
complex coefficients, then the plot shows both the real and imaginary components of the
response on a single axes and indicates the imaginary component with a diamond marker. You
can also view the response using magnitude-phase and complex-plane plots. (since R2025a)
initialplot(___, simulates the
response for the time steps specified by t)t. You can use
t with any of the input argument combinations in previous syntaxes.
To define the time steps, you can specify:
The final simulation time using a scalar value.
The initial and final simulation times using a two-element vector. (since R2023b)
All the time steps using a vector.
initialplot(___,
plots the initial condition response with the plotting options specified in
plotoptions)plotoptions. Settings you specify in
plotoptions override the plotting preferences for the current
MATLAB® session. This syntax is useful when you want to write a script to generate
multiple plots that look the same regardless of the local preferences.
initialplot(___,
specifies response properties using one or more name-value arguments. For example,
Name=Value)initialplot(sys,LineWidth=1) sets the plot line width to 1. (since R2026a)
When plotting responses for multiple systems, the specified name-value arguments apply to all responses.
The following name-value arguments override values specified in other input arguments.
initialplot( plots
the initial condition response in the specified parent graphics container, such as a
parent,___)Figure or TiledChartLayout, and sets the
Parent property. Use this syntax when you want to create a plot in
a specified open figure or when creating apps in App Designer.
ip = initialplot(___)
Examples
Generate a random state-space model with 5 states and create the initial condition response plot chart object ip.
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
ip = initialplot(sys,x0);
Change the time units to minutes and turn on the grid. To do so, edit properties of chart object.
ip.TimeUnit = "minutes"; grid on

The plot automatically updates when you modify the properties of the chart object.
Consider the following two-input, two-output dynamic system.
Convert the sys to state-space form since initial condition plots are supported only for state-space models.
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
The resultant state-space model has four states. Hence, provide an initial condition vector with four elements.
x0 = [0.3,0.25,1,4];
Plot the initial condition response. Turn on the grid and change the plot title.
ip = initialplot(sys,x0); title("Initial Condition Plot of MIMO System sys(s)") grid on

For this example, consider a MIMO state-space model with 3 inputs, 3 outputs and 3 states. Create an initial condition plot with red colored grid lines.
Create the MIMO state-space model sys_mimo.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys_mimo = ss(A,B,C,D); size(sys_mimo)
State-space model with 3 outputs, 3 inputs, and 3 states.
Create an initial condition plot with chart object ip and display the grid.
x0 = [0.35,0.1,4];
ip = initialplot(sys_mimo,x0);
grid on
Set the grid color to red.
ip.AxesStyle.GridColor = [1 0 0];

The plot automatically updates when you modify the chart object. For MIMO models, initialplot produces a grid of plots, each plot displaying the initial condition response of one I/O pair.
For this example, examine the initial condition response of the following zero-pole-gain model and limit the plot to tFinal = 15 s. Use 15-point blue text for the title.
First, convert the zpk model to an ss model since initialplot only supports state-space models.
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
Create the initial conditions response plot and set the title properties of the chart object.
ip = initialplot(sys,x0,tFinal); ip.Title.FontSize = 15; ip.Title.Color = [0 0 1];

For this example, plot the initial condition responses of three dynamic systems and use the plot handle to enable the grid.
First, create the three models and provide the initial conditions.
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];Plot the initial condition responses of the three models.
t = 0:0.1:5; ip = initialplot(sys1,'r--',sys2,'b',sys3,'g-.',x0,t); legend('sys1','sys2','sys3'); grid on

Since R2025a
Create a state-space model with complex coefficients.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Plot the initial-condition response of the system to an arbitrary starting state.
ic = [1 2]; ip = initialplot(sys,ic);
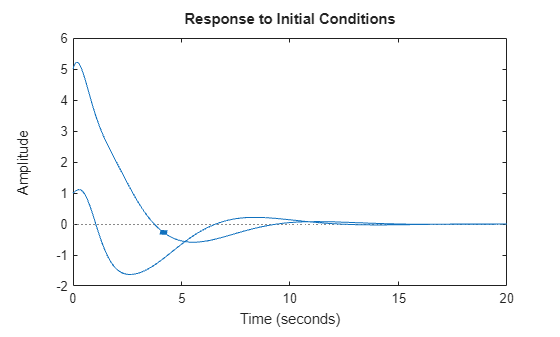
By default, the plot shows the real and imaginary components of the response on a single axes, indicating the imaginary component using a diamond marker.
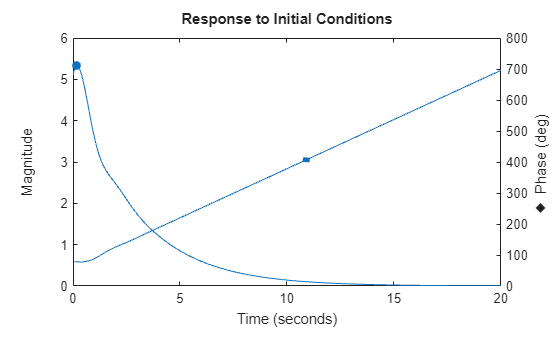
You can also view the complex response using either a magnitude-phase plot or a complex-plane plot. For example, to view the magnitude and phase of the response, right-click the plot area and select Complex View >Magnitude-Phase.
Alternatively, you can set the ComplexViewType parameter of the corresponding chart object.
ip.ComplexViewType = "magnitudephase";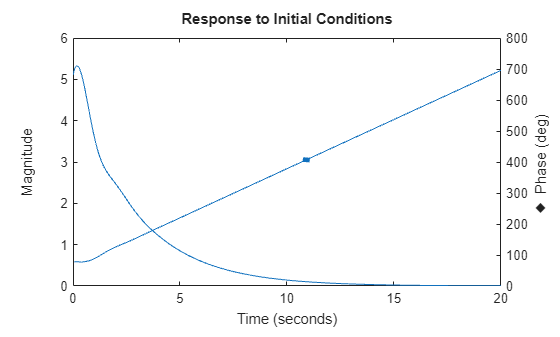
The plot shows the magnitude and phase of the response on a single axes, indicating the phase plot using a diamond marker.
You can view response characteristics in the plot. For example, to view the peak response, right-click the plot and select Characteristics > Peak Response.
Alternatively, you can enable the Visible property of the corresponding characteristic parameter of the chart object.
ip.Characteristics.PeakResponse.Visible = "on";