Extremum Seeking Control for Anti-Lock Braking Systems
Learn how to optimize braking torque for an anti-lock braking system to minimize the stopping distance of a vehicle. Use the Extremum Seeking Control block to maximize the friction coefficient characteristic between the road and the tire surface by optimizing the desired wheel slip. This block tracks the maximum of the friction coefficient characteristic function by modulating the desired wheel slip with sinusoidal signals, demodulating the resulting perturbed objective function, and updating the desired wheel slip by integrating the demodulated signal. Compare the braking performance of the vehicle with and without the anti-lock braking system under hard braking conditions.
Published: 8 Jun 2021
In this video, we will see how we can use the Extremum Seeking Control to optimize braking torque for an anti-lock braking system and minimize stopping distance. To start let's look at how an anti-lock braking system works conceptually.
In a vehicle, the frictional force acting on the circumference of the tire is proportional to the coefficient of friction. This coefficient of friction has a maximum for a low non-zero wheel slip value and decreases as the slip increases. During hard braking conditions, the anti-lock braking system will try to maximize this friction coefficient by adjusting the braking torque to maintain a desirable wheel slip. This will help the vehicle to come to a controlled stop by preventing the wheels from locking out.
In this subsystem we simulate the braking characteristics of a vehicle with an anti-lock braking system. It takes in a value of the desired wheel slip and modulates the braking torque to achieve that wheel slip. Inside the subsystem, we can visualize the velocity of the vehicle and the wheel as well as the distance traveled by the vehicle while braking.
Also modeled are the friction coefficient between the road and the tire surface and the total wheel slip calculated by this expression. First, let's consider the case of hard braking without the presence of an anti-lock braking system. This would cause the wheels to lock out, meaning the wheel slip becomes one. We will induce a wheel lock out by setting the desired wheel slip to the anti-lock braking system to one with this constant block here.
The simulation has been run for the scenario. And here, you can see that the wheels angular velocity rapidly reduces the zero, meaning the wheel is starting to slip on the ground. The vehicle velocity slowly reduces, and it takes about 180 meters and 12 seconds for the vehicle to come to a stop from an initial velocity of around 35 meters per second.
Now let's continue the case when the anti-lock braking system is enabled. We will use Extremum Seeking Control to find the desired wheel slip that the anti-lock braking system should achieve to maximize the friction coefficient characteristic and in turn, minimize the stopping distance. We will make use of the Extremum Seeking Control block introduced in Simulink Control Design of R2021a.
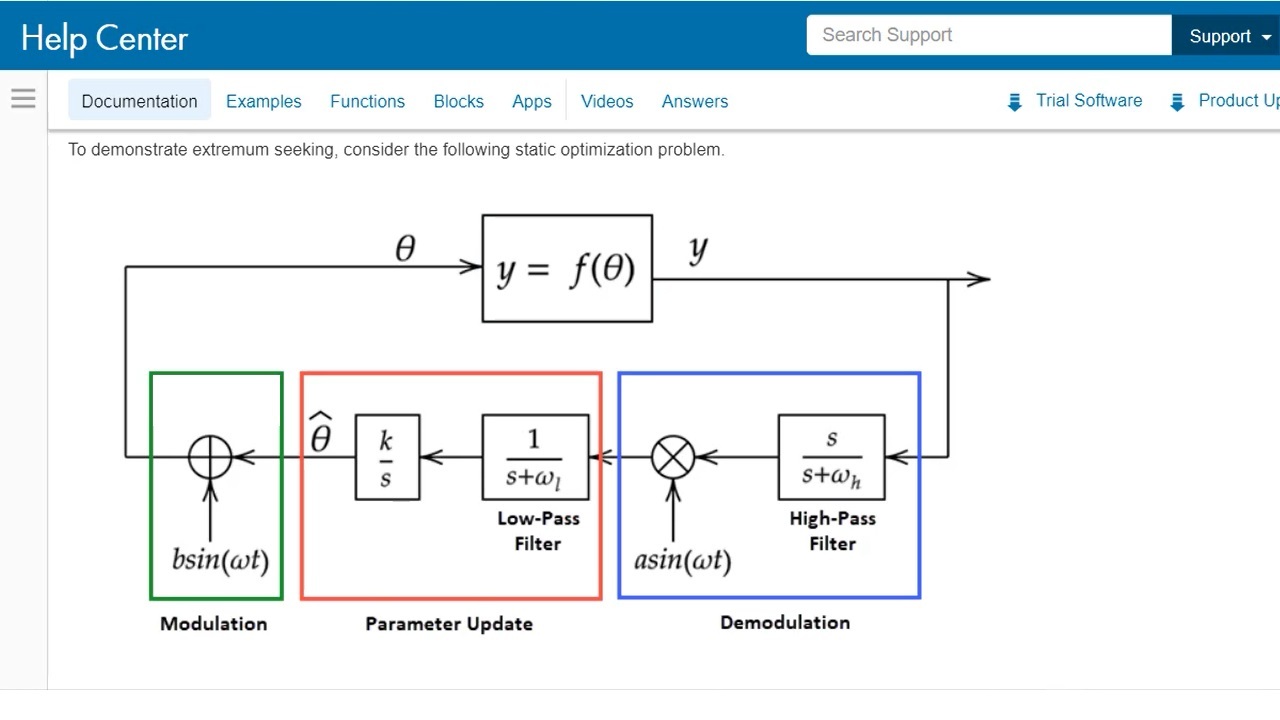
This block creates a model free real time adaptive control approach for automatically computing optimal control parameters that maximize a static or dynamic objective function. It tracks the maximum of the objective function by modulating-- otherwise perturbing the parameter being optimized with sinusoidal signals, demodulating the resulting perturbed objective function, and updating the parameter value by integrating the demodulated signal.
For this example, the input to this block would be the objective function-- that is the friction coefficient that we would like to maximize. And the output would be the optimal control input to the anti-lock braking system-- that is the desired wheel slip. The block diagram of this block shows how the controller is designed, and lets us set the parameters of the Extremum Seeking Controller.
In the parameters, we will set the number of parameters to be tuned to be one, since we are only tuning the desired wheel slip. Now we need to provide a good initial condition for the desired wheel slip so that the controller can converge to an optimum value. We will pick this initial slip to be 0.15.
For the frequency of the modulation and demodulation signals, we need to choose a frequency lower than the frequencies of the important system dynamics. Let us set this to 0.7 radians per second. Next, the learning rate controls the rate at which the block gets to slip parameters. We will set this gain to 0.3.
Now the product of the modulation and the demodulation signals along with the learning rate, controls the convergence speed for the algorithm. For most applications, the demodulation amplitude is much larger than the modulation amplitude. So for this application, we will set this to 1 and 0.02 respectively.
Next, let's specify the phases of the modulation and demodulation signals. For this application, the demodulation phase, phi 1, and the modulation phase, phi 2, are set as parameter 2 and 0. For your applications, set phi 1 and phi 2 such that the cosine of phi 1 minus phi 2 is greater than zero.
Now we will enable the high-pass filter to remove any signal bias from the friction coefficient objective function before demodulation. We can also enable the low-pass filter to remove high frequency components from the demodulated signals before the update of the slip parameters. We will specify these cut-off frequencies for the high and low-pass filters to be 0.5 and 1 radians per second. Click OK to finish parameter raising the Extremum Seeking Controller.
Now let's rerun the simulation for hard braking to stop the vehicle. Throughout the braking event, the Extremum Seeking Controller will find the desired wheel slip and will maximize the friction coefficient between the tire and the road surface. This desired slip is then passed to the anti-lock braking sub-system which modulates the braking torque to achieve this slip.
Let's now compare the values of the friction coefficient objective function with and without the anti-lock braking system. Here we see that the Extremum Seeking Control tracks the maximum of the friction coefficient characteristic at 0.6. This brings about maximum deceleration and a shorter stopping distance of 110 meters in just over six seconds, as we see here-- compared to the scenario where anti-lock braking was disabled.
Then it took the vehicle 180 meters and 12 seconds to stop. Also with the anti-lock braking system, the wheel angular velocity gradually reduced to 0 along with the vehicle velocity, indicating that the wheels did not lock up during the breaking event.
So in summary, we saw how you can use the Extremum Seeking Controller a block to optimize the braking performance of an anti-lock braking system by maximizing the friction coefficient between the road and the tire surface. Further, you can also generate C or C++ code from this block and deploy to hardware, allowing you to test and integrate your controller design or hardware.

Featured Product
Simulink Control Design










웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다: United States
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)