이 페이지의 내용은 이전 릴리스에 관한 것입니다. 해당 영문 페이지는 최신 릴리스에서 제거되었습니다.
PX4를 사용한 Hardware-in-the-Loop 시뮬레이션(HITL)
PX4를 사용한 Hardware-in-the-Loop 시뮬레이션(HITL)의 작동 방법을 알아봅니다. 다음 항목은 HITL 아키텍처, 물리 연결, HITL 설정에 대해 알아보는 데 도움이 됩니다.
도움말 항목
VTOL UAV 제어기 템플릿 배포
- PX4 Hardware-in-the-Loop (HITL) Simulation and Visualization with VTOL UAV
Use PX4 HITL simulation and Unreal Engine to verify your VTOL UAV control design.
추천 예제
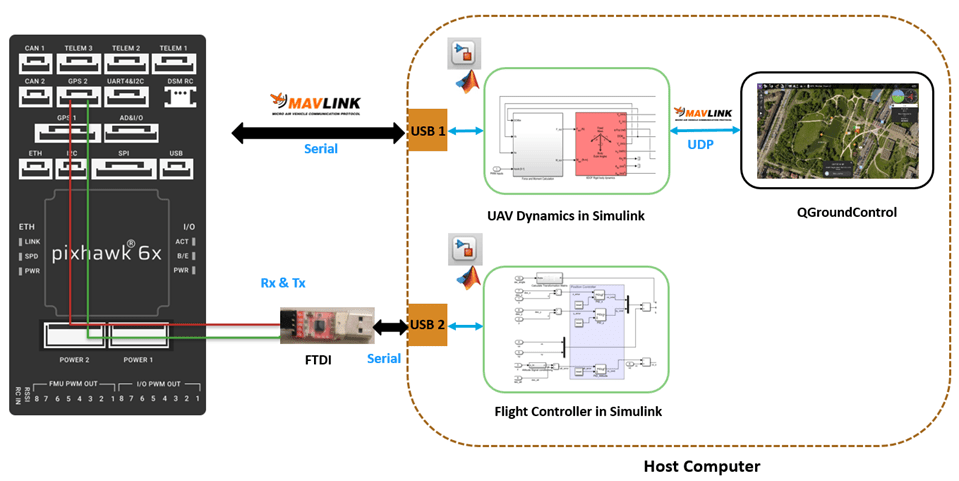
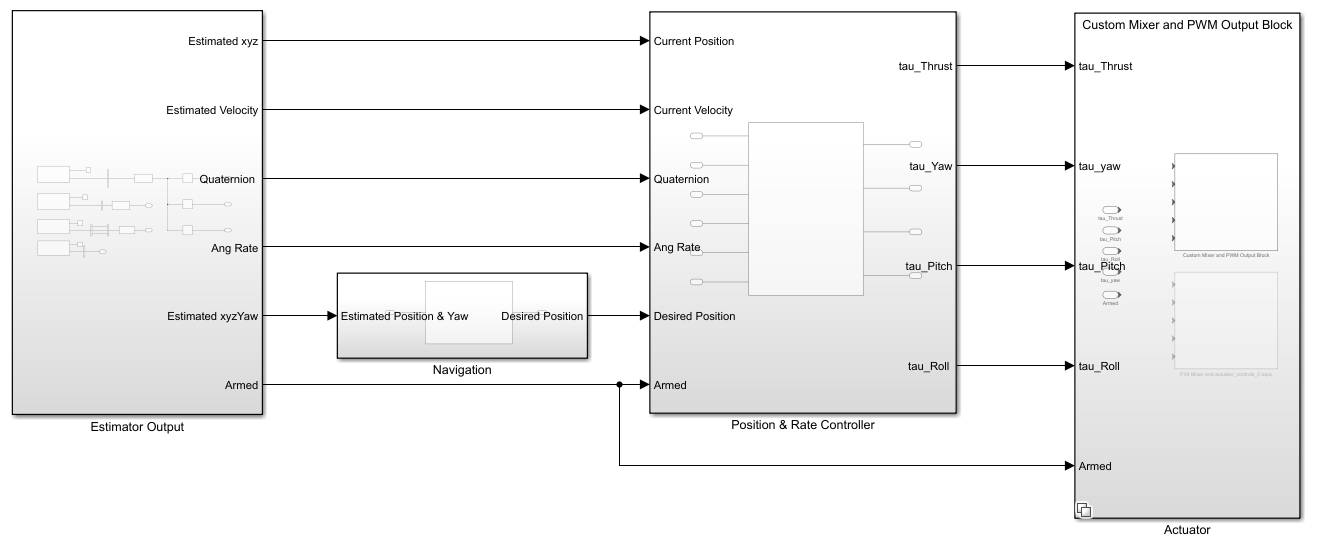
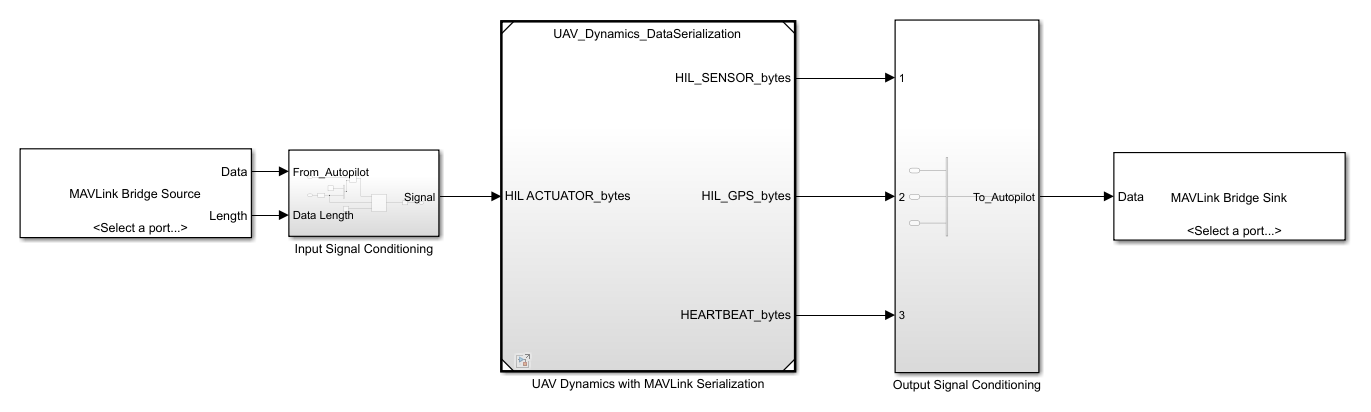
Run PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics in Simulink
Verify a controller design by deploying on Pixhawk® hardware board in Hardware-in-the-Loop (HITL) mode. Hardware-in-the-Loop (HITL or HIL) is a simulation mode in which normal PX4 firmware is run on real flight controller hardware. This approach lets you test most of the actual flight code on the real autopilot hardware, while the UAV dynamics in Simulink®. To understand the physical connections required to set up the Pixhawk and Simulink for HITL Simulation, go through the PX4 Hardware-in-the-Loop System Architecture.

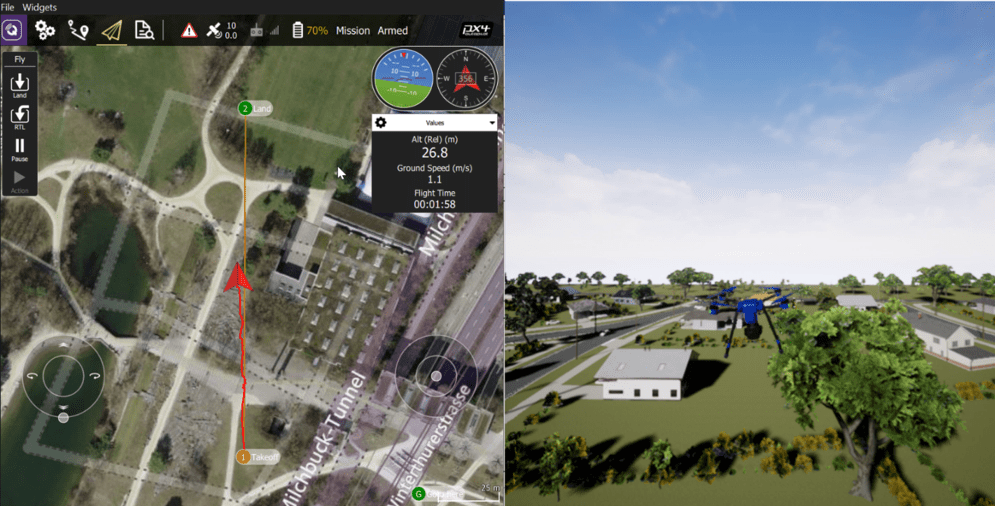
Scenario Simulation and Flight Visualization with PX4 Hardware-in-the-Loop (HITL) and UAV Dynamics in Simulink
Demonstrates 3D scenario Simulation and Flight visualization with PX4® Hardware-in-the-Loop (HITL) and UAV Dynamics contained in Simulink®. Unreal Engine® simulation environment is used for the 3D scenario Simulation and visualization. For more information, see Unreal Engine Simulation for Unmanned Aerial Vehicles.
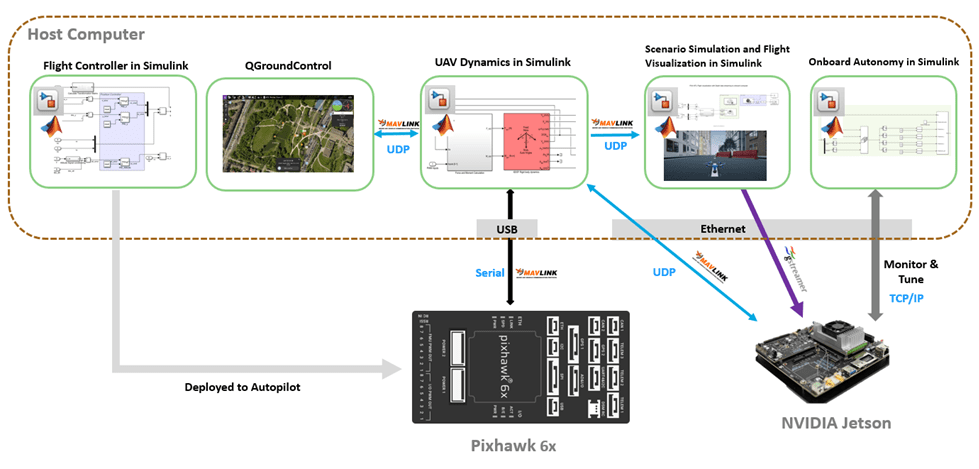
PX4 Autopilot and NVIDIA Jetson in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics Modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify an autonomous algorithm deployed on NVIDIA® Jetson™ as Onboard Computer along with Pixhawk® hardware board, in HITL mode with UAV Dynamics contained in Simulink®.
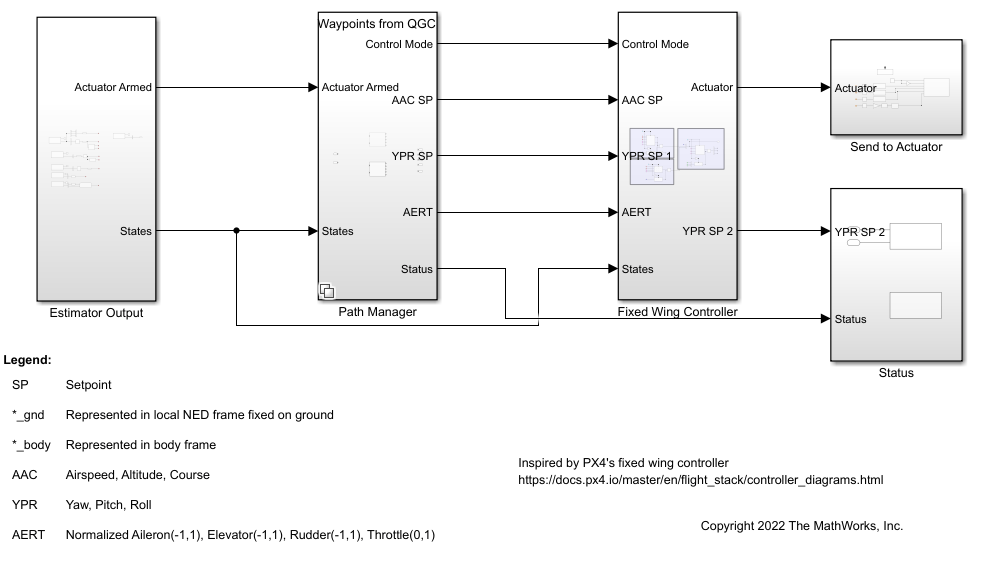
PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying the design on the PX4 Autopilot hardware board. This is done in HITL mode with fixed-wing UAV Dynamics contained in Simulink®.
Obstacle Avoidance in NVIDIA Jetson with PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics Modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify an Obstacle avoidance algorithm deployed on NVIDIA® Jetson™ as Onboard Computer along with Pixhawk® hardware board, in HITL mode and the UAV Dynamics contained in Simulink®.

UVify IFO-S Autopilot and NVIDIA Jetson in Hardware-in-the-Loop (HITL) Simulation in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to deploy and verify algorithms on UVify IFO-S Drone, with NVIDIA® Jetson™ as Onboard computer.
PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with Speedgoat in Simulink
How you the use the UAV Toolbox Support Package for PX4® Autopilots to deploy a quadcopter plant dynamics model into Speedgoat Real-Time target machine and perform hardware-in-the-loop simulation. Additionally, you can validate your control logic running on PX4 Autopilot against nominal and adverse conditions such as sensor failures.
PX4 Stock Autopilot in HITL Simulation with UAV Dynamics Modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to design UAV Dynamics in Simulink® and verify them by using the PX4 Stock Autopilot in HITL mode.