이 페이지의 내용은 이전 릴리스에 관한 것입니다. 해당 영문 페이지는 최신 릴리스에서 제거되었습니다.
PX4 Autopilot에서 시뮬레이션을 모니터링 및 조정 모드(외부 모드)에서 실행하기
PX4 Autopilot에서 실행 중인 Simulink 모델에서 실행 중인 신호 모니터링 및 파라미터 조정
UAV Toolbox Support Package for PX4 Autopilots를 사용하여 PIL(Processor-in-the-Loop)로 코드에 대한 검증 및 확인을 수행하는 방법을 알아봅니다.
추천 예제
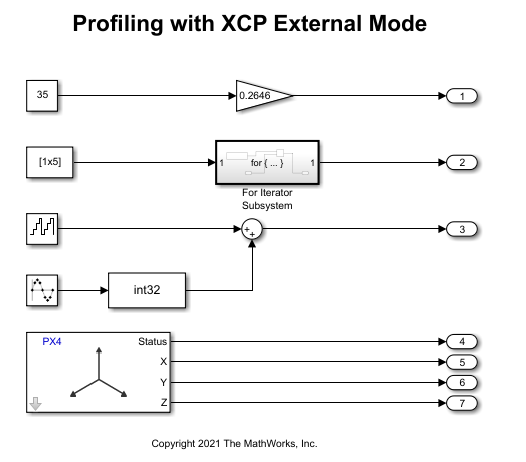
Code Execution Profiling on PX4 Target in Monitor & Tune Simulation
Use the UAV Toolbox Support Package for PX4® Autopilots to profile the real-time execution of the generated code running as an executable on a PX4 target hardware with XCP on Serial Interface.