Configure Simulink Model for Deployment in Hardware-in-the-Loop (HITL) Simulation
Configure PX4 Controller Model in Simulink
After completing the Hardware setup process, prepare the flight controller algorithm using the Simulink® blocks available in the UAV Toolbox Support Package for PX4® Autopilots. Perform these steps to configure the Simulink model.
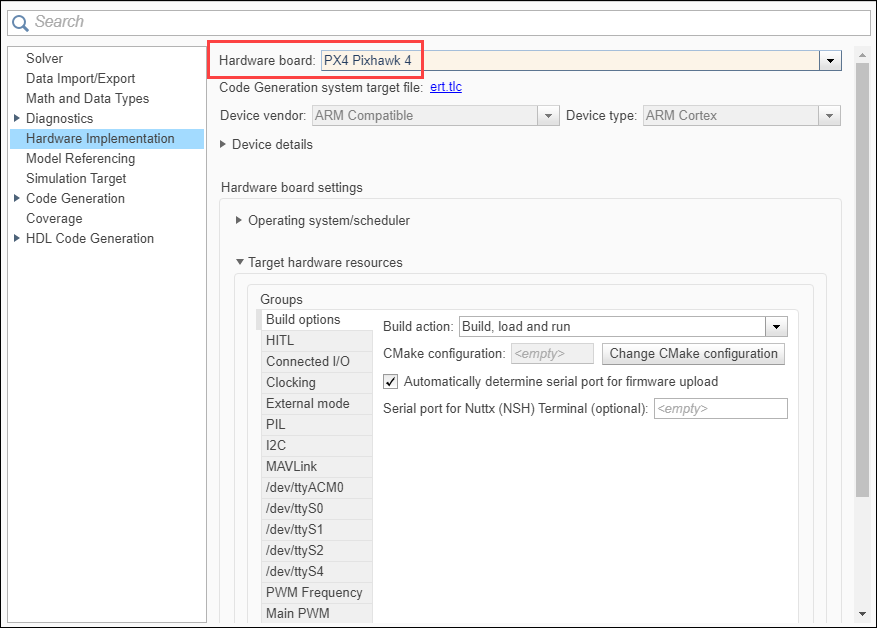
In the Modeling tab, click Model Settings.
In the Configuration Parameters dialog box, choose any Pixhawk® Series board.
Click HITL and then select Enable HITL Mode.
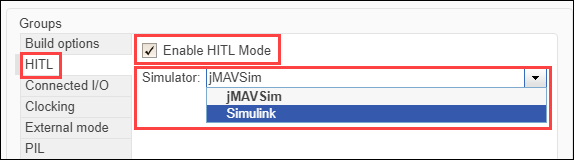
Select
Simulinkas Simulator.Click Apply and then click OK.
See Also
Set Up PX4 Firmware for Hardware-in-the-Loop (HITL) Simulation | Configure Simulink Model for Monitor & Tune Simulation with Hardware-in-the-Loop (HITL)