이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
컴포넌트 거동 설명하기
시스템 설계를 구현하기 위해 아키텍처 모델의 컴포넌트 거동을 정의합니다.
Simulink 모델 또는 서브시스템에 컴포넌트를 연결합니다.
컴포넌트에 Stateflow의 상태 머신 거동을 추가합니다.
컴포넌트에 Simscape의 물리 거동을 추가합니다.
기존의 FMU(Functional Mockup Unit)에 컴포넌트를 연결합니다.
파라미터를 모델 인수로 지정하여 컴포넌트에 인스턴스별 값을 설정합니다. 동일한 참조 모델 또는 아키텍처에 연결된 각 컴포넌트는 파라미터에 독립된 값을 지정할 수 있습니다.
블록
| Component | Add components to architecture model |
| Reference Component | Link to architectural definition or Simulink behavior |
클래스
함수
툴
| [Architecture Views Gallery] | Create and manage views and sequence diagrams |
| [Parameter Editor] | Add, edit, and promote parameters for architectures and components (R2022b 이후) |
| [Sequence Viewer] | Visualize messages, events, states, transitions, and functions |
| [Allocation Editor] | Create and manage model-to-model allocations |
도움말 항목
- Implement Component Behavior Using Simulink
Associate components with behavior models in Simulink.
- Implement Component Behavior Using Simscape
Associate components with physical behavior in Simscape. (R2021b 이후)
- Implement Component Behavior Using Stateflow Charts
Associate components with state machine behavior in Stateflow.
- Implement Component Behavior Using Activity Diagrams
Associate components with functional behavior models in Activity Diagram.
추천 예제
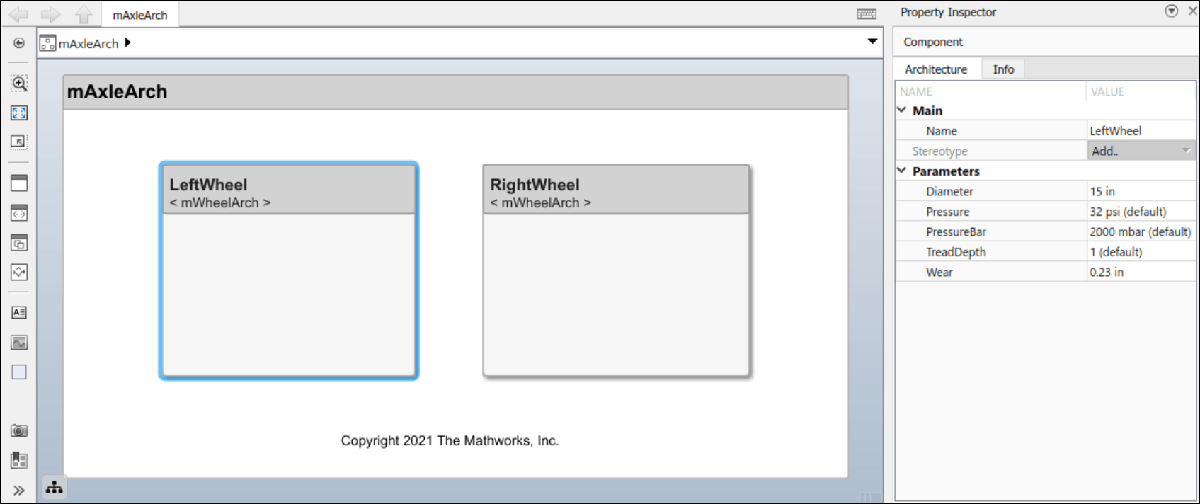
Use Parameters to Store Instance Values with Components
Use instance-specific parameter values on referenced models to specify component parameters independently.

Merge Message Connections for Architectures Using Adapter Block
Use an Adapter block to route messages between reference components in a system architecture.

Design Insulin Infusion Pump Using Model-Based Systems Engineering
Design an insulin infusion pump with variant analysis using System Composer.

Model-Based Systems Engineering for Space-Based Applications
Explore the CubeSat model-based systems engineering project template.

Build Architecture Models Programmatically
Programmatically build an architecture model.
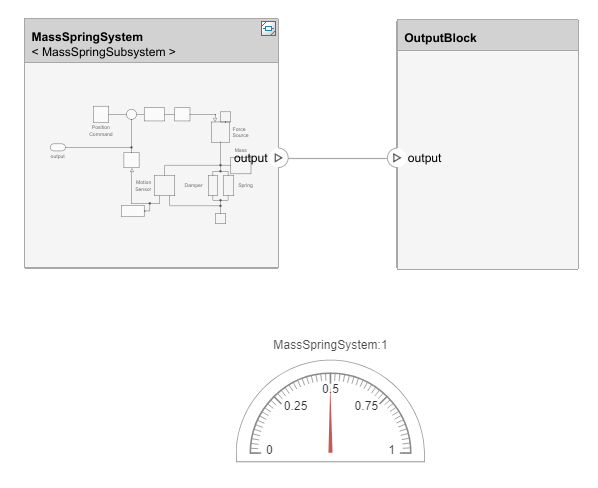
Visualize Mass-Spring-Damper Data in System Composer with Dashboard Block
Build architecture model with dashboard blocks.
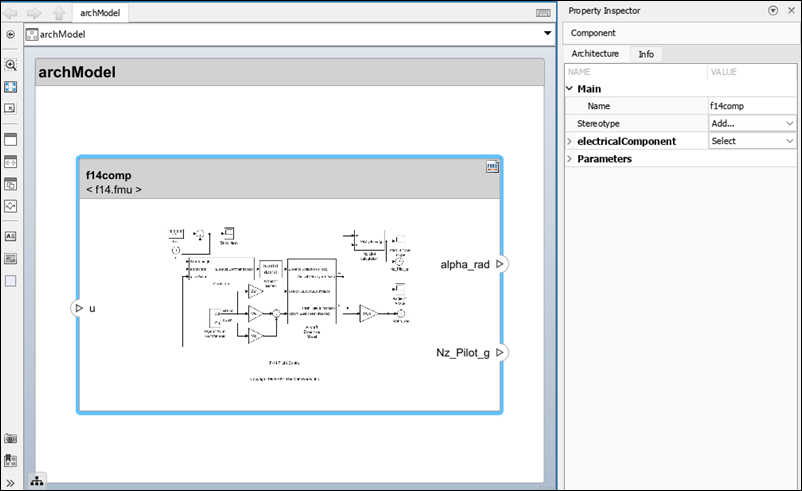
Use FMU Components with Architectural Data in Architecture Models
FMU components with architectural data in architecture models.

Validate Requirements for Machine Cooling System Architecture
Validate requirements using a machine cooling example.