제어 기능이 있는 스테퍼 모터
이 예제에서는 Stepper Motor 블록과 Stepper Motor Driver 블록을 함께 사용하여, 제어 기능이 있는 영구 자석 스테퍼 모터를 모델링하는 방법을 보여줍니다. 모델에는 2가지 제어기 옵션, 즉 위치 제어 옵션과 속도 제어 옵션이 있습니다. 제어기 유형을 변경하려면 Controller 서브시스템을 마우스 오른쪽 버튼으로 클릭하고 Variant -> 레이블 모드 활성 선택지를 선택한 다음 위치 또는 속도를 선택합니다. 스테퍼의 풀 스텝 크기는 1.8도입니다. 위치 제어 모드에서 Ref 포트에 대한 입력은 원하는 스텝 수입니다. 속도 제어 모드에서 Ref 포트에 대한 입력은 원하는 초당 스텝 수입니다.
이 모델은 시스템 수준에서 스테퍼 모터의 동특성을 연구하고, 주어진 부하를 구동했을 때 스텝각 슬립이 일어나는지 파악하는 데 적합합니다. 스텝 성능을 개선하기 위해 스테퍼 제어기를 조정하는 데 이 모델을 사용할 수 있습니다. 이 제어기를 완제품 스테퍼 제어기 모듈에 부분적으로 또는 완전히 구현할 수도 있습니다. 이 알고리즘을 PIC(peripheral interface controller) 같은 마이크로프로세서에 구현하면 유연성을 높일 수 있으며, 시스템의 다른 부분을 제어하는 데에 이 마이크로프로세서를 사용할 수 있습니다. Stepper Motor Driver 블록의 일부를 마이크로프로세서에 구현하고 전력 증폭기 단계만 아날로그 전자 회로에 둘 수 있습니다.
모델 열기

위치 제어 테스트의 시뮬레이션 결과 보기
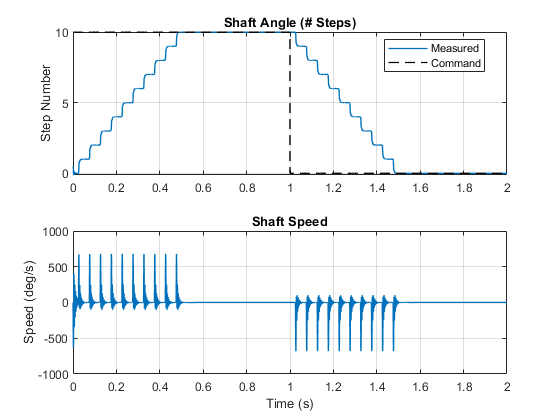
아래 플롯에서는 위치 제어기를 사용할 때 모터 샤프트 각도와 요구 신호를 비교합니다. 위치 제어 알고리즘은 위치 명령을 스텝 수로 받으며, 이 명령을 스테퍼 모터 드라이버를 제어하는 펄스 열로 변환합니다. 각속도 플롯에 표시된 스파이크는 샤프트가 명령된 위치에 정착할 때 생깁니다.
속도 제어 테스트의 시뮬레이션 결과 보기
아래 플롯에서는 속도 제어기를 사용할 때 모터 샤프트 각도와 요구 신호를 비교합니다. 속도 제어 알고리즘은 속도 명령을 스텝 수로 받으며, 이 명령을 스테퍼 모터 드라이버를 제어하는 펄스 열로 변환합니다. 각속도 플롯에 표시된 스파이크는 샤프트가 현재 스텝에 정착할 때 생깁니다.

아래 플롯은 스테퍼 드라이버의 핀 상태가 스테퍼 모터의 동작에 어떤 영향을 미치는지 보여줍니다. 이 드라이버는 인에이블(ENA) 신호가 Stepper Motor Driver 블록의 인에이블 임계 전압 파라미터 값을 넘어 상승할 때마다 스텝을 시작합니다.

참고 항목
Stepper Motor | Stepper Motor Driver