DC 모터 제어(RST)
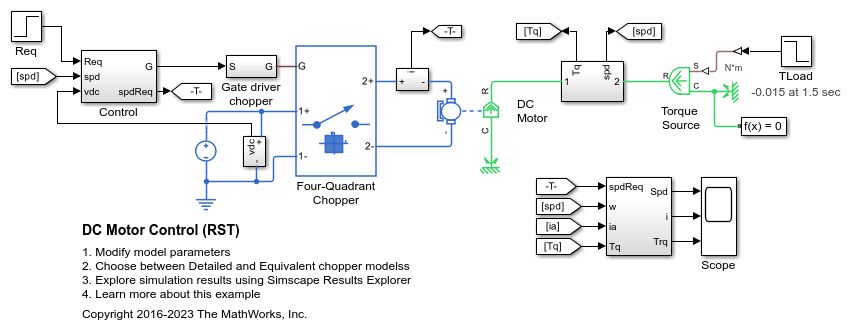
이 예제에서는 DC 모터에 대한 RST 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 제어 지평이 30인 RST 제어기와 PWM 생성이 포함됩니다. 센서는 5ms의 지연으로 회전자 속도를 측정합니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.
모델
실시간 시뮬레이션의 결과
이 예제는 다음 플랫폼에서 테스트되었습니다.
Intel® 3.5 GHz i7 멀티코어 CPU 및 4GB가 탑재된 Speedgoat™ Performance 실시간 타깃 머신
Intel® Core XEON E3-1275v3 (3.5GHz) 및 4GB RAM이 탑재된 dSPACE® SCALEXIO LabBox
Simscape 로컬 솔버를 사용하면 이 모델을 20마이크로초의 스텝 크기로 실시간 실행할 수 있습니다. 샘플 레이트가 작을 경우, 콜드 캐시(cold cache)로 인해 초기 태스크 실행 중 태스크 오버런이 발생할 수 있습니다. 이러한 오버런을 방지하려면, 선택한 플랫폼에서 해당 옵션을 지원하는 경우 실시간 애플리케이션의 시작 단계에서 허용되는 태스크 오버런 수를 제한하거나 주기적 태스크의 샘플 시간 시간을 늘려서 시작 동작을 완화하십시오.
참고 항목
DC Motor | Four-Quadrant Chopper | RST Controller