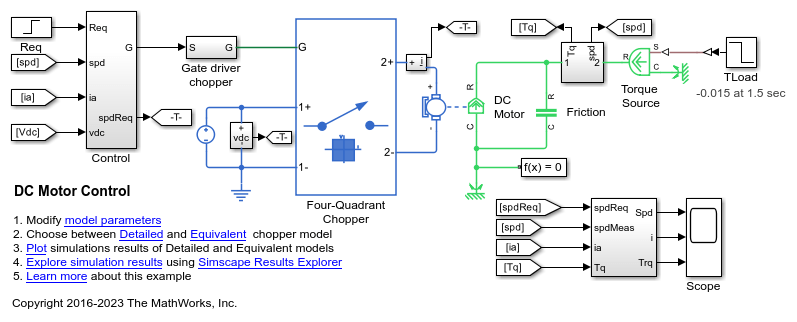
DC 모터 제어
이 예제에서는 DC 모터에 대한 캐스케이드 속도-제어 구조를 보여줍니다. PWM 제어 4사분면 초퍼는 DC 모터에 전력을 공급하는 데 사용됩니다. Control 서브시스템에는 바깥쪽 속도-제어 루프, 안쪽 전류-제어 루프, PWM 생성이 포함됩니다. 총 시뮬레이션 시간(t)은 4초입니다. t = 1.5초에서 부하 토크가 증가합니다. t = 2.5초에서 기준 속도가 1000rpm에서 2000rpm으로 변경됩니다.
모델
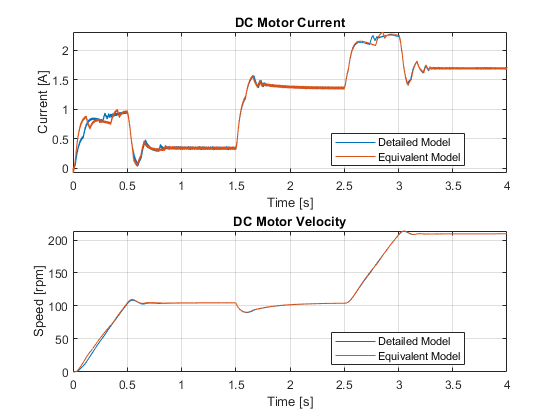
상세 모델과 등가 모델의 시뮬레이션 결과 비교하기
실시간 시뮬레이션의 결과
이 예제는 다음 플랫폼에서 테스트되었습니다.
Intel® 3.5 GHz i7 멀티코어 CPU 및 4GB가 탑재된 Speedgoat™ Performance 실시간 타깃 머신
Intel® Core XEON E3-1275v3 (3.5GHz) 및 4GB RAM이 탑재된 dSPACE® SCALEXIO LabBox
Simscape 로컬 솔버를 사용하면 이 모델을 20마이크로초의 스텝 크기로 실시간 실행할 수 있습니다. 샘플 레이트가 작을 경우, 콜드 캐시(cold cache)로 인해 초기 태스크 실행 중 태스크 오버런이 발생할 수 있습니다. 이러한 오버런을 방지하려면, 선택한 플랫폼에서 해당 옵션을 지원하는 경우 실시간 애플리케이션의 시작 단계에서 허용되는 태스크 오버런 수를 제한하거나 주기적 태스크의 샘플 시간 시간을 늘려서 시작 동작을 완화하십시오.