Simulink 함수
Simulink 함수를 사용하여 Simulink 모델 계층 구조에서 액세스 가능한 함수를 정의할 수 있습니다. Simulink 함수는 제공되는 입력과 구현된 함수의 동작에 따라 일련의 출력을 계산합니다. Simulink 함수를 사용하여 다음과 같은 작업을 수행할 수 있습니다.
함수 이름, 입력 인수, 출력 인수를 포함한 함수 프로토타입을 지정합니다(예:
y = f(u)).Simulink Function 블록, Stateflow® 차트에서 내보낸 함수 또는 S-Function 블록을 사용하여 Simulink 환경에서 함수 동작을 구현합니다.
모델 계층 구조 전체에서 함수를 호출하고 재사용합니다.
자세한 내용은 Simulink Functions Overview 항목을 참조하십시오.
블록
도움말 항목
Simulink 함수 이해
- Simulink Functions Overview
Use Simulink functions to define functions that are accessible in the Simulink model hierarchy. - Define a Simulink Function in a Model
Define a Simulink function using a Simulink Function block, an exported Stateflow function, or an S-Function block. - Call a Simulink Function from a Model
Call a Simulink function using a Function Caller block, a Stateflow chart, a MATLAB Function or MATLAB System block, an S-Function block, or an event action of a SimEvents® block. - Scoped, Global, and Port-Scoped Simulink Function Blocks Overview
Specify visibility and access of Simulink Function blocks. - Simulink Function Blocks in Referenced Models
Add and access functions in model components.
유효 범위가 설정된 Simulink 함수
- Scoped Simulink Function Blocks in Subsystems
Limit the scope of a function to a subsystem. - Scoped Simulink Function Blocks in Models
Limit the scope of a function to a model. - Resolve Error: Block Is Unable to Call The Scoped Simulink Function
Troubleshoot block unable to call the function error in Simulink.
포트 범위로 설정된 Simulink 함수
- Model Client and Server Components Using Function Ports
Use function ports to model client and server components in a service-oriented architecture. - Service Interfaces Overview (System Composer)
Create client and server ports, author service interfaces, and simulate service-oriented communication.
관련 정보
- Model Service-Oriented Communication Between Sensors (System Composer)
- Simulate Asynchronous Services for Vehicle Headlight Management (System Composer)
- Trigger Simulink Components with Discrete Events in SimEvents (SimEvents)
- AUTOSAR Client-Server Communication (AUTOSAR Blockset)
- Model AUTOSAR Adaptive Service Communication (AUTOSAR Blockset)
- Generate Reentrant Code from Simulink Function Blocks (Embedded Coder)
추천 예제
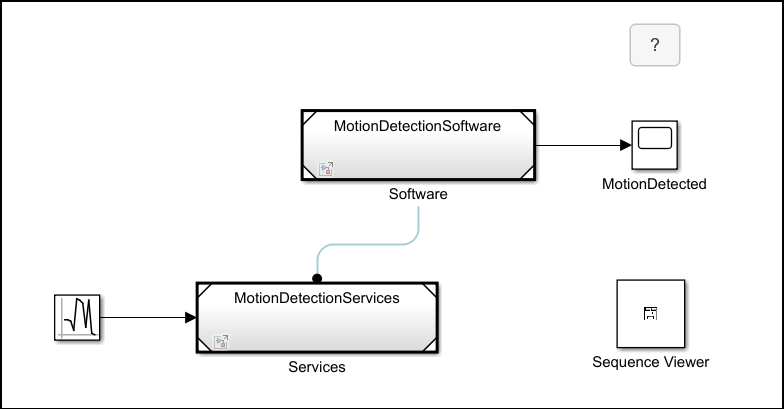
Model Service Access from Application Software Using Scoped Simulink Functions
Model services and accessing these services from a separate component.

Monitor Ink Status on Shared Printer Using Simulink Functions
How multiple clients can send requests to a server and receive a status from the server. Using Simulink® functions, different subsystems can call functions from other subsystems and interact in Simulink and Stateflow®. In this example, you model the ink status monitoring of a shared printer using Simulink functions.

Reuse Multiple Instances of a Simulink Function
To reuse components, use multiple instances of a function.
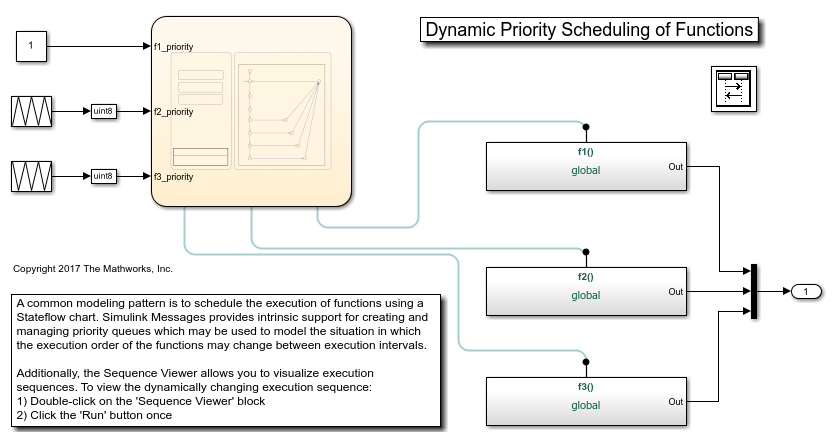
함수의 동적 우선 순위 스케줄링
이 예제에서는 Stateflow® 차트를 사용하여 함수 실행을 동적으로 스케줄링하기 위한 일반적인 모델링 패턴을 보여줍니다.

메시지로 통신하는 온도 제어 시스템
다양한 수신기의 메시지를 사용하여 방 온도 조절 장치의 메시지 처리 및 제어 명령 통신을 통해 방 온도 분산 제어

Wireless Tire Pressure Monitoring System with Fault Logging
Model a wireless tire pressure monitoring system with fault logging using message communication.