Continuous
연속 함수 블록(예: Derivative 및 Integrator)
Continuous 라이브러리의 블록을 사용하여 미분 방정식을 모델링합니다. 신호에 대한 시간 도함수를 구할 수 있습니다. 신호를 적분하거나 지연시킬 수 있습니다. 전달 함수 또는 상태공간 표현을 사용하여 PID 제어기 및 선형 시스템을 모델링할 수 있습니다.
블록
| Derivative | 시간에 대해 연속 입력 신호의 근사 연속 도함수를 계산합니다. |
| Descriptor State-Space | Model continuous linear system as system of implicit state-space equations |
| Entity Transport Delay | Introduce a delay in propagation of a SimEvents message |
| First Order Hold | Implement linearly extrapolated first order hold on input signal |
| Integrator | 신호 적분 |
| Integrator Limited | 신호 적분 |
| PID Controller | Continuous-time or discrete-time PID controller |
| PID Controller (2DOF) | Continuous-time or discrete-time two-degree-of-freedom PID controller |
| Second-Order Integrator | Second-order integration of input signal |
| Second-Order Integrator Limited | Second-order integration of input signal |
| State-Space | 연속 선형 시스템을 명시적 상태공간 연립방정식으로 모델링 |
| Transfer Fcn | 전달 함수로 선형 시스템 모델링 |
| Transport Delay | 주어진 시간만큼 입력 지연 |
| Variable Time Delay | Delay input by variable amount of time |
| Variable Transport Delay | Delay input by variable amount of time |
| Zero-Pole | Model system using zero-pole-gain transfer function |
도움말 항목
- Model a Continuous System
Model a system with variables defined at all time values.
추천 예제
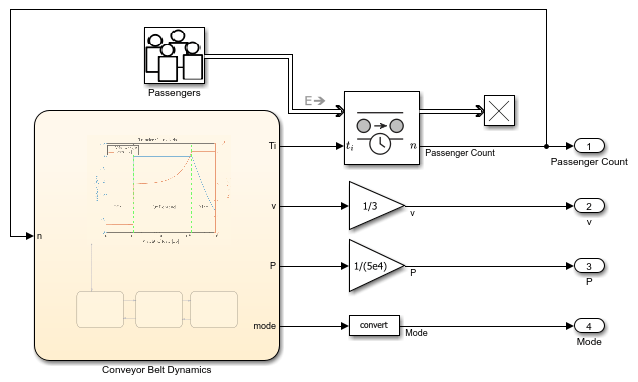
Model Conveyor Belt as Cyber-Physical System
Model a variable-speed conveyor belt as a cyber-physical system by combining continuous-time, discrete-event, and finite-state modeling techniques. The model in this example integrates the modeling techniques required to represent the cyber-physical system into a single simulation environment by using Simulink®, SimEvents®, and Stateflow®.
교육 관련 자료

Virtual Hardware and Labs for Controls
개/폐루프 피드백 제어 시스템 구축, 전달 함수 계산 및 위치 분석 수행에 대한 개념을 알아봅니다.