Derivative
시간에 대해 연속 입력 신호의 근사 연속 도함수를 계산합니다.
라이브러리:
Simulink /
Continuous
설명
Derivative 블록은 시뮬레이션 시간 t에 대해 연속 입력 신호 u의 연속 도함수를 근사합니다. 연속 샘플 시간을 갖는 미분 가능 신호의 도함수를 계산해야 할 경우 Derivative 블록을 사용하십시오.
Derivative 블록을 부적절하게 사용하면 시뮬레이션 결과가 부정확해질 수 있습니다. 가능한 경우 Derivative 블록에 대해 다음 대안을 고려하십시오.
도함수 대신 적분에 대한 해를 구하도록 시스템 방정식을 다시 배열합니다. 그런 다음, 미분하는 대신 Integrator 블록과 같은 블록을 사용하여 적분하도록 새 방정식을 기반으로 모델을 구조화합니다.
예제는 Best-Form Mathematical Models 항목을 참조하십시오.
Transfer Fcn 블록이 Derivative 블록의 입력 신호 또는 출력 신호에도 작용하는 경우에는 대신에 전달 함수에 영점을 추가하여 신호에 대한 도함수를 구현하십시오.
이산 시스템에서 이산 신호에 대한 유한 차분 또는 차분몫을 계산하려면 Discrete Derivative 블록을 사용하십시오.
Derivative 블록을 사용해야 하는 경우 연속 샘플 시간을 갖는 미분 가능 입력 신호만 이 블록에 사용하십시오.
이 포트에 연결된 신호가 이산 샘플 시간을 갖거나 "보조 스텝에서 고정됨" 샘플 시간을 갖는 경우 경고가 발생합니다. (R2023b 이후)
입력 신호가 상수 샘플 시간을 갖는 경우 경고가 발생하지는 않지만, 신호 값을 조정하면 입력 신호에 불연속성이 발생합니다. 이러한 불연속점을 포함해 미분하면 출력 신호에 스파이크가 발생합니다.
이산 시스템에서 이산 신호에 대한 유한 차분 또는 차분몫을 계산하려면 Discrete Derivative 블록을 사용하십시오.
연속 미분 근사의 정확도 보장하기
Derivative 블록을 사용하는 경우 블록 출력 신호의 정확도가 요구 사항을 충족하도록 해야 합니다. 적절한 컨텍스트에서 사용되더라도 Derivative 블록 출력 신호의 정확도는 스텝 크기에 따라 달라지며 시스템 나머지 부분의 동특성에 따라 달라질 수도 있습니다.
최대 스텝 크기 파라미터를 사용하여 가변 스텝 솔버가 정확도 요구 사항을 충족하기에 너무 큰 스텝을 선택하지 않도록 합니다. 적절한 최대 스텝 크기 값을 선택하기 위해 시뮬레이션을 여러 번 실행해야 할 수도 있습니다.
가변 스텝 시뮬레이션에서 솔버는 모델 전체에서 연속 상태 계산의 오차를 모니터링하여 각 주 시간 스텝의 크기를 결정합니다. 연속 상태에 대해 계산된 값의 오차가 지정된 허용오차 수준을 초과할 경우 솔버는 오차가 허용오차 범위 내에 속할 때까지 스텝 크기를 줄입니다.
Derivative 블록에는 연속 상태가 없으므로 솔버는 Derivative 블록 계산이 허용오차 요구 사항을 충족하도록 스텝 크기를 조정할 수 없습니다. 입력 신호 값이 빠르게 변할 때 솔버가 큰 시간 스텝을 취하면 블록이 예기치 않은 출력값을 생성할 수 있습니다.
예제
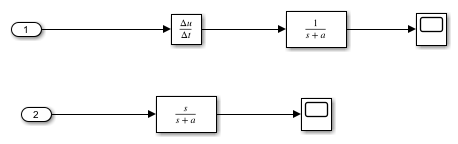
Transfer Fcn 블록을 사용하여 개선된 선형화
Transfer Fcn 블록을 사용하여 개선된 선형화.
포트
입력
출력
파라미터
블록 특성
데이터형 |
|
직접 피드스루 |
|
다차원 신호 |
|
가변 크기 신호 |
|
영점교차 검출 |
|
알고리즘
Derivative 블록은 수치적 차분 를 계산하여 연속 도함수 를 근사합니다. 여기서 는 입력 신호 값의 변화량이고 는 솔버가 현재 시뮬레이션 시간에 도달하기 위해 택한 주 시간 스텝의 크기입니다. 연속 미분 근사의 정확도는 입력 신호의 변화율과 스텝 크기에 따라 달라집니다.
Derivative 블록의 초기 출력값은 항상 0입니다. 초기 출력값을 고려할 때, 이 방정식은 블록 입력 신호와 출력 신호 간의 정확한 관계를 나타냅니다.
t는 현재 시뮬레이션 시간입니다.
는 시뮬레이션에서 마지막 주 시간 적중이 발생한 시간입니다.