rosbag
rosbag 로그 파일 열기 및 구문 분석
설명
bag = rosbag(filename)filename에 있는 rosbag의 모든 메시지 인덱스를 포함하고 있으면서 인덱싱 가능한 BagSelection 객체인 bag을 만듭니다. BagSelection 객체를 가져오려면 rosbag 함수를 사용합니다. 데이터에 액세스하려면 readMessages 함수 또는 timeseries 함수를 호출하여 관련 데이터를 추출합니다.
rosbag 또는 bag은 ROS 메시지 데이터를 저장하기 위한 파일 형식입니다. 주로 ROS 네트워크 내에서 메시지를 기록하는 데 사용됩니다. 또한 오프라인 분석, 시각화, 저장을 위해 bag을 사용할 수 있습니다. rosbag에 대한 자세한 내용은 ROS Wiki 페이지를 참조하십시오.
예제
rosbag에서 정보를 가져옵니다. MATLAB® 경로에 rosbag이 아직 없는 경우 rosbag에 대한 전체 경로를 지정합니다.
bagselect = rosbag('ex_multiple_topics.bag');시간별, 토픽별로 필터링하여 메시지의 일부를 선택합니다.
bagselect2 = select(bagselect,'Time',... [bagselect.StartTime bagselect.StartTime + 1],'Topic','/odom');
rosbag 로그 파일에 대한 정보를 보기 위해 rosbag info filename**을 사용합니다. 여기서 filename은 rosbag(.bag) 파일입니다.
rosbag info 'ex_multiple_topics.bag'
Path: /tmp/Bdoc26a_3146167_782271/tpcab6618d/ros-ex32890909/ex_multiple_topics.bag
Version: 2.0
Duration: 2:00s (120s)
Start: Dec 31 1969 19:03:21.34 (201.34)
End: Dec 31 1969 19:05:21.34 (321.34)
Size: 23.6 MB
Messages: 36963
Types: gazebo_msgs/LinkStates [48c080191eb15c41858319b4d8a609c2]
nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7]
rosgraph_msgs/Clock [a9c97c1d230cfc112e270351a944ee47]
sensor_msgs/LaserScan [90c7ef2dc6895d81024acba2ac42f369]
Topics: /clock 12001 msgs : rosgraph_msgs/Clock
/gazebo/link_states 11999 msgs : gazebo_msgs/LinkStates
/odom 11998 msgs : nav_msgs/Odometry
/scan 965 msgs : sensor_msgs/LaserScan
rosbag을 불러온 다음 사용할 수 있는 프레임을 확인하여 rosbag (.bag) 파일에서 변환을 가져옵니다. 이 프레임에서 getTransform 함수를 사용하여 두 좌표 프레임 간의 변환을 쿼리합니다.
rosbag을 불러옵니다.
bag = rosbag('ros_turtlesim.bag');사용할 수 있는 프레임의 목록을 가져옵니다.
frames = bag.AvailableFrames;
두 좌표 프레임 간의 최근 변환을 가져옵니다.
tf = getTransform(bag,'world',frames{1});특정 시간에 사용할 수 있는 변환을 확인하고 해당 변환을 가져옵니다. 사용할 수 있는 변환을 검사하기 위해 canTransform을 사용합니다. rostime 함수를 사용하여 시간을 지정합니다.
tfTime = rostime(bag.StartTime + 1); if (canTransform(bag,'world',frames{1},tfTime)) tf2 = getTransform(bag,'world',frames{1},tfTime); end
rosbag을 불러옵니다.
bag = rosbag('ros_turtlesim.bag');특정 토픽을 선택합니다.
bSel = select(bag,'Topic','/turtle1/pose');
메시지를 구조체로 읽어옵니다. 메시지를 읽을 때 DataFormat 이름-값 쌍을 지정합니다. 반환된 구조체의 셀형 배열에서 첫 번째 구조체를 검사합니다.
msgStructs = readMessages(bSel,'DataFormat','struct'); msgStructs{1}
ans = struct with fields:
MessageType: 'turtlesim/Pose'
X: 5.5016
Y: 6.3965
Theta: 4.5377
LinearVelocity: 1
AngularVelocity: 0
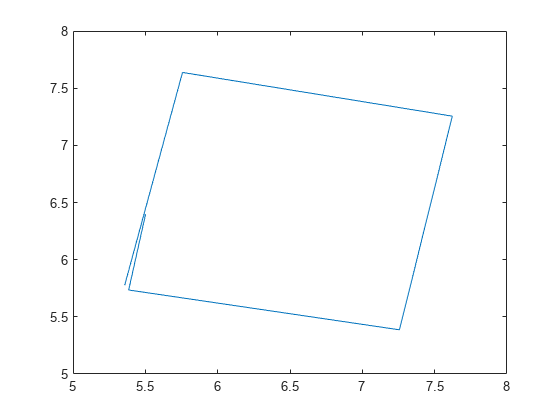
메시지에서 xy 점을 추출하고 로봇 궤적을 플로팅합니다.
구조체에서 모든 X 필드와 Y 필드를 추출하기 위해 cellfun을 사용합니다. 이 필드는 rosbag을 기록할 동안의 로봇의 xy 위치를 나타냅니다.
xPoints = cellfun(@(m) double(m.X),msgStructs); yPoints = cellfun(@(m) double(m.Y),msgStructs); plot(xPoints,yPoints)
입력 인수
출력 인수
버전 내역
R2019b에 개발됨
참고 항목
select | readMessages | canTransform | getTransform | timeseries | BagSelection