RTDE(실시간 데이터 교환) 연결 인터페이스 시작하기
Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators를 사용하면, RTDE(실시간 데이터 교환)를 통해 Universal Robots의 패키지를 사용하여 Universal Robots의 물리적 협동로봇 또는 URSim의 시뮬레이션된 협동로봇을 연결하고 제어할 수 있습니다.
RTDE를 통해 UR 시리즈 매니퓰레이터를 연결하는 설정의 설명에 따라 RTDE 초기 설정을 완료하고 나면, URControl(Control Box의 Mini-ITX PC에서 실행되는 로우 레벨 로봇 제어기)과 MATLAB®(클라이언트) 사이의 연결을 설정하고 URScript 기반 함수를 사용하여 협동로봇을 프로그래밍할 수 있습니다.
urRTDEClient 객체에는 로봇의 개별 조인트 각도와 카테시안 자세를 제어하는 함수가 있습니다. 좀 더 고급 수준의 함수는 Robotics System Toolbox 기능을 사용하여 3차원 공간에서 매끄러운 궤적을 추적하는 데 필요한 조인트 각도를 계산하는 방법과 로봇이 미리 계산된 궤적을 추적하도록 명령하는 방법을 보여줍니다.
함수
urRTDEClient | Connect to simulated or physical cobot from Universal Robots over RTDE (R2024a 이후) |
followCartesianWaypoints | Command robot to move along the desired Cartesian waypoints (R2024a 이후) |
followJointWaypoints | Command robot to move along the desired joint space waypoints (R2024a 이후) |
readCartesianPose | Get current end-effector pose from the robot (R2024a 이후) |
readEndEffectorVelocity | Get current end-effector velocities from the robot (R2024a 이후) |
readJointConfiguration | Get current joint configuration from the robot (R2024a 이후) |
readJointVelocity | Get current joint velocities from the robot (R2024a 이후) |
readMotionStatus | Get current motion status of the robot (R2024a 이후) |
recordRobotState | Log the key robot state parameters during motion of robot (R2024a 이후) |
sendJointConfiguration | Command robot to move to desired joint configuration (R2024a 이후) |
sendJointConfigurationAndWait | Command robot to move to joint configuration and wait for the motion to complete (R2024a 이후) |
sendCartesianPoseAndWait | Command robot to move to desired Cartesian pose and wait for the motion to complete (R2024a 이후) |
manageGripperAttachment | Attach or detach gripper connected to Universal Robots cobot (R2024a 이후) |
actuateGripper | Control attached gripper with grip or release action (R2024a 이후) |
sendServoJCommands | Send Servoj commands (R2024a 이후) |
sendSpeedJCommands | Send speedj commands (R2024a 이후) |
executeURScriptCommand | Send URScript command to control cobot over RTDE interface (R2024a 이후) |
urClientRigidBodyTree | Load rigid body tree model of Universal Robots UR Series cobot (R2026a 이후) |
블록
| Actuate Gripper | Actuate gripper connected to cobot (R2025a 이후) |
| Read Controller Output | Read specified signals from UR Controller using RTDE interface (R2025a 이후) |
| Read Motion Status | Read motion status of cobot from UR Controller using RTDE interface (R2025a 이후) |
| Follow Joint Waypoints | Command UR Series cobot using the RTDE interface to follow a specified set of joint positions (R2025a 이후) |
| Read Joint Configuration | Read current joint configuration from UR Controller using RTDE interface (R2025a 이후) |
| Send Joint Configuration | Command the UR cobot using the RTDE interface to move to a specified joint configuration (R2025a 이후) |
추천 예제
Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots Using RTDE Interface
Use the urRTDEClient object to connect to a Universal Robots cobot and move the robot using joint space control, task space control, waypoint tracking in task space, and waypoint tracking in joint space. This example uses Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators.

Getting Started with UR RTDE Blocks Library to Control UR Series Cobot from Simulink
Use Simulink blocks under UR RTDE Blocks Simulink Library to manipulate motion of UR Series cobot using joint configuration or joint space waypoints, and obtain feedback from the cobot.
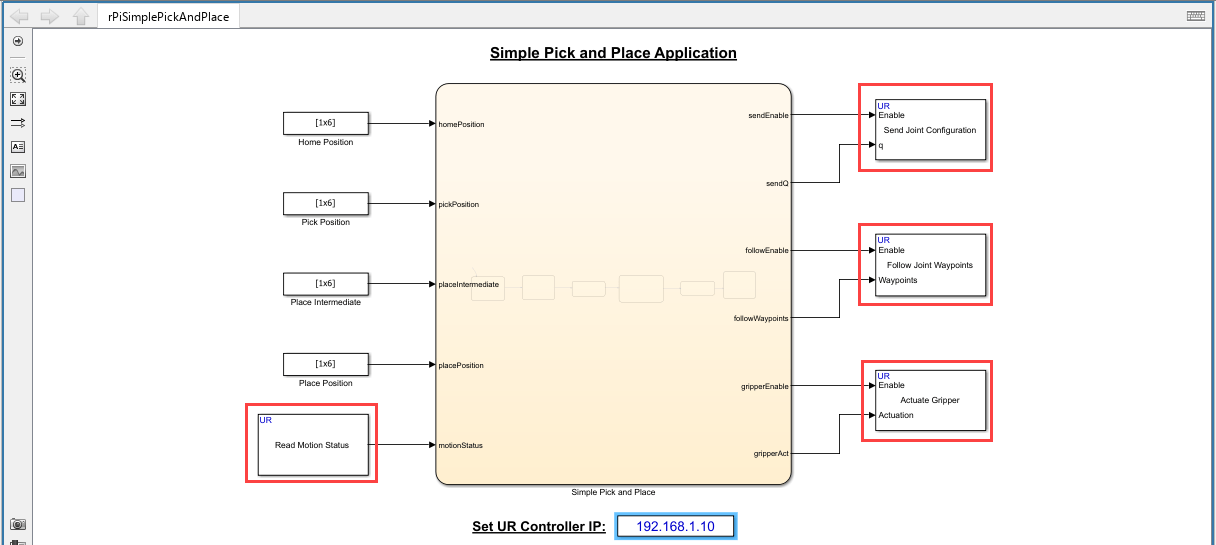
Pick and Place Objects Using Stateflow and RTDE Blocks by Deploying to a Raspberry Pi Board
Use a combination of Stateflow® and Simulink® RTDE (Real-time Data Exchange) blocks to perform a pick-and-place operation using Universal Robots UR Series cobot. The example deploys the code to a Raspberry Pi board, which acts as a controller for the connected cobot.