RTDE를 통해 UR 시리즈 매니퓰레이터를 연결하는 설정
RTDE를 통해 UR 시리즈 매니퓰레이터를 연결하기 위해 다양한 종속 항목을 설정하고 구성
RTDE(실시간 데이터 교환) 기능을 제공하는 Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators를 사용하면 Universal Robots 협동로봇을 연결하고 제어하는 기능이 향상됩니다. RTDE는 협동로봇과 실시간으로 데이터를 교환할 수 있는 고성능 인터페이스를 제공하여 특히 로봇과 외부 시스템 간의 정확한 동기화가 필요한 응용 분야에서 더욱 효율적이고 신뢰할 수 있는 제어 체계를 지원합니다.
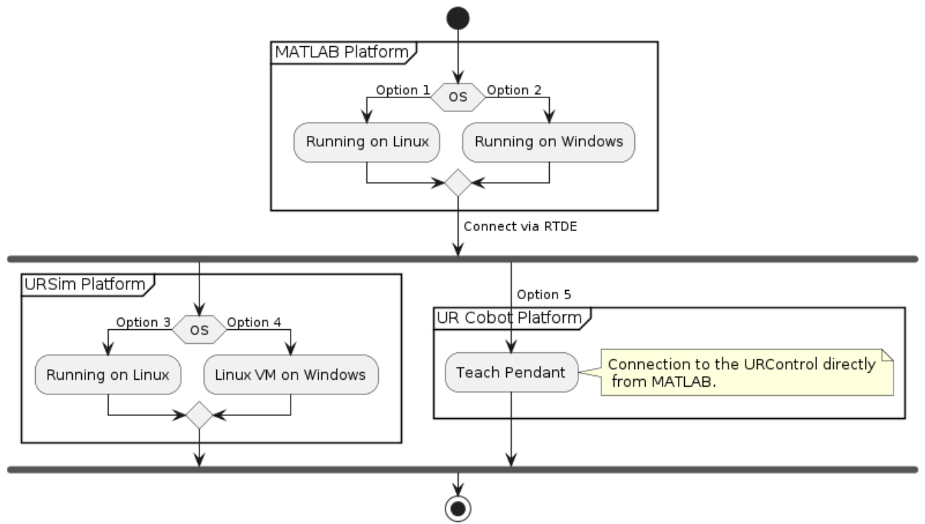
다음 이미지와 표는 URSim 오프라인 시뮬레이터 또는 하드웨어에 연결하여 RTDE 기반 워크플로를 수행하는 옵션을 보여줍니다.
| 연결 옵션 | MATLAB®과 지원 패키지가 포함된 운영 체제 | UR 시리즈 협동로봇 또는 URSim이 설치된 운영 체제 | 설명 |
|---|---|---|---|
| URSim에 연결(Set Up URSim Offline Simulator for RTDE 항목 참조) | Linux® | Linux에서 URSim 실행 | Linux에서 실행되는 URSim에 직접 연결 |
| Windows® | Linux에서 URSim 실행 | Linux에서 실행되는 URSim에 직접 연결 | |
| Windows | Linux VM에서 URSim 실행 | Windows에서 호스팅하는 Linux VM에서 실행되는 URSim에 연결 | |
| UR 시리즈 협동로봇에 연결(Set Up UR Series Cobot for RTDE 항목 참조) | Linux | UR 시리즈 협동로봇 | MATLAB에서 UR 시리즈 협동로봇의 교시 조작기(Teach Pendant)에 연결 |
| Windows | UR 시리즈 협동로봇 | MATLAB에서 UR 시리즈 협동로봇의 교시 조작기(Teach Pendant)에 연결 |
도움말 항목
- Install Support for UR Series Hardware for RTDE
Install Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators for RTDE.
- Set Up URSim Offline Simulator for RTDE
Setup instructions for the URSim simulator from Universal Robots for controlling cobot over RTDE protocol.
- Set Up UR Series Cobot for RTDE
Set up and enable remote control from MATLAB computer to UR Series cobot for communicating over RTDE.