제어 시스템
제어 시스템 엔지니어는 플랜트 모델링, 컨트롤러 설계, 코드 자동 생성을 통한 배포, 시스템 검증을 포함한 모든 개발 단계에서 MATLAB® 및 Simulink®를 사용할 수 있습니다. MATLAB 및 Simulink 제어 시스템 제품을 사용하여 다음을 수행할 수 있습니다.
기본 모델, 시스템 식별 또는 자동 파라미터 추정을 사용하여 선형 및 비선형 플랜트 동특성을 모델링합니다.
비선형 Simulink 모델에 대한 주파수 응답을 트리밍, 선형화 및 계산합니다.
근궤적, 보드 다이어그램, LQR, LQG, 기타 설계 기법을 사용하여 플랜트 모델을 기반으로 컨트롤러를 설계합니다.
오버슈트, 상승 시간, 위상 여유, 이득 여유, 시간 영역과 주파수 영역의 여러 성능 및 안정성 특성을 사용하여 제어 시스템 성능을 대화형 방식으로 분석합니다.
PID 및 이득 스케줄링이 사용되는 임의의 SISO 및 MIMO 제어 시스템을 자동으로 조정합니다.
모델을 예측하는 강인한 제어기를 설계 및 구현하거나, 모델 기준 적응형 제어, 극값 탐색 제어, 강화 학습, 퍼지 논리와 같이 모델이 주어지지 않은(model-free) 제어 방법을 사용합니다.
제어 알고리즘을 임베디드 시스템에 배포하여 실시간 제어, 조정 또는 파라미터 추정을 수행합니다.
상태 모니터링 알고리즘과 예측 정비 알고리즘을 설계하고 테스트합니다.
제어 시스템 관련 제품
Control System Toolbox
제어 시스템의 설계 및 분석
System Identification Toolbox
입력-출력 데이터에서 선형 및 비선형 동적 시스템 모델 만들기
Predictive Maintenance Toolbox
상태 모니터링과 예측 정비 알고리즘 설계 및 테스트
Robust Control Toolbox
Design robust controllers for uncertain plants
Model Predictive Control Toolbox
Design and simulate model predictive controllers
Fuzzy Logic Toolbox
Design and simulate fuzzy logic systems
Simulink Control Design
모델 선형화와 제어 시스템 설계
Simulink Design Optimization
모델 민감도 분석 및 모델 파라미터 조정
Reinforcement Learning Toolbox
강화 학습을 사용하여 정책 설계 및 훈련
Motor Control Blockset
모터 제어 알고리즘 설계 및 구현
C2000 Microcontroller Blockset
Design, simulate, and implement applications for Texas Instruments C2000 microcontrollers
STM32 Microcontroller Blockset
Design, simulate, and implement applications for STMicroelectronics STM32 microcontrollers
Raspberry Pi Blockset
Design, simulate, and deploy applications for Raspberry Pi.
도움말 항목
플랜트 모델링, 시스템 식별 및 파라미터 추정
- 모델 객체를 사용한 제어 시스템 모델링 (Control System Toolbox)
모델 객체를 사용하여 제어 시스템을 나타내는 모델을 작성합니다. - Analyze Data in Multivariable Systems and Identify Models (System Identification Toolbox)
Collect MIMO data, estimate and compare models, and view corresponding model responses. - Online ARX Parameter Estimation for Tracking Time-Varying System Dynamics (System Identification Toolbox)
Perform online parameter estimation for a time-varying ARX model at the MATLAB command line. - Inverted Pendulum Parameter Estimation (Simulink Design Optimization)
Estimate multiple parameters of a model by iterated estimations.
트리밍, 선형화 및 주파수 응답 추정
- Compute Operating Points from Specifications Using Steady State Manager (Simulink Control Design)
Find steady-state operating points that meet specifications by trimming your Simulink model using the Steady State Manager app. - 모델 동작점에서 Simulink 모델 선형화하기 (Simulink Control Design)
초기 상태 값과 입력 신호로 구성된 동작점에서 모델을 선형화합니다. - Frequency Response Estimation in Model Linearizer Using Pseudorandom Binary Sequence (Simulink Control Design)
Identify a frequency-domain model for a high-frequency power electronics system using a PRBS input signal in Model Linearizer.
제어 설계 및 조정
- 근궤적 설계 (Control System Toolbox)
그래프로 근궤적을 조정하여 전기 유압 서보메커니즘을 위한 보상기를 설계합니다. - Design Compensator Using Automated Tuning Methods (Control System Toolbox)
Tune a compensator using automated tuning methods in Control System Designer. - Tune Control Systems Using systune (Control System Toolbox)
Usesystuneto tune structured controllers for a simple application. - Design Controller for Power Electronics Model Using Simulated I/O Data (Simulink Control Design)
Use PID Tuner to identify a plant model and design a PID controller for a power electronics model that cannot be linearized. - Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block (Simulink Control Design)
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.
예측 제어 및 강인 제어
- Design MPC Controller in Simulink (Model Predictive Control Toolbox)
Design and simulate a model predictive controller for a Simulink model using MPC Designer. - Robust Control of Active Suspension (Robust Control Toolbox)
In this example, use H∞ synthesis to design a controller for a nominal plant model. Then, use μ synthesis to design a robust controller that accounts for uncertainty in the model.
적응형 제어 및 지능형 제어
- Model Reference Adaptive Control of Aircraft Undergoing Wing Rock (Simulink Control Design)
Design an MRAC controller that adapts disturbance model parameters to achieve performance matching an ideal reference model. - 강화 학습 디자이너를 사용하여 에이전트 설계 및 훈련하기 (Reinforcement Learning Toolbox)
강화 학습 디자이너 앱을 사용하여 카트-폴 시스템에 대한 DQN 에이전트를 설계하고 훈련시킵니다. - Design Controller for Artificial Pancreas Using Fuzzy Logic (Fuzzy Logic Toolbox)
Design and tune a FIS tree to control insulin infusion for type-1 diabetes.
배포 가능한 알고리즘
- Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems (Motor Control Blockset)
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block. - Simulation and Code Generation Using Simulink Coder (Model Predictive Control Toolbox)
Simulate your MPC controller in Simulink and generate real-time code that uses either double-precision or single-precision signals. - Parameter Tuning for Digital Twins (Simulink Design Optimization)
Monitor the condition of an electric vehicle battery in the field with a deployed version of parameter estimation using Simulink Compiler™.
추천 예제

Multiloop Control of a Helicopter
Use slTuner and systune to tune a
multi-loop controller for a rotorcraft.

Design PID Controllers for Three-Phase Rectifier Using Closed-Loop PID Autotuner Block
Tune controllers for a Vienna-rectifier-based power factor corrector using the Closed-Loop PID Autotuner block.
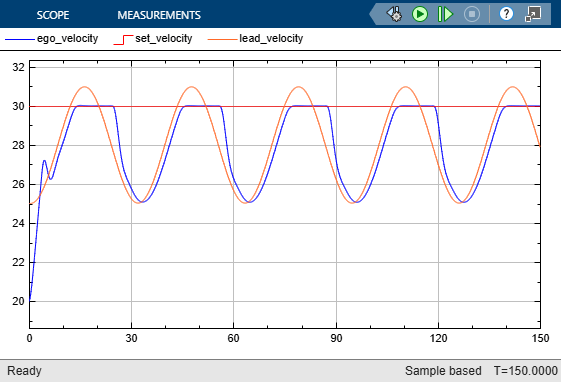
Adaptive Cruise Control Using Extremum Seeking Control
Design an extremum seeking controller to adjust controller gains for an adaptive cruise control system.

Control PMSM Loaded with Dual Motor (Dyno) Using C2000 Processors
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

Lane Following Using Nonlinear Model Predictive Control
Design a lane-following controller using nonlinear MPC with road curvature previewing.

구름 요소 베어링 결함 진단
가속도 신호를 기반으로 구름 요소 베어링의 결함 진단을 수행합니다.