plannerAStarGrid
그리드 맵의 A* 경로 플래너
설명
plannerAStarGrid 객체는 A* 경로 플래너를 생성합니다. 플래너는 점유 맵에서 A* 탐색을 수행하여 발견법에 근거한 비용을 기반으로 시작 그리드 위치부터 목표 그리드 위치 사이에 장애물이 없는 최단 경로를 찾습니다.
생성
구문
설명
planner = plannerAStarGridbinaryOccupancyMap 객체를 갖는 plannerAStarGrid 객체를 생성합니다.
planner = plannerAStarGrid(map)map을 사용하여 plannerAStarGrid 객체를 생성합니다. map을 binaryOccupancyMap 객체 또는 occupancyMap 객체로 지정하십시오. map 입력값은 Map 속성의 값을 설정합니다.
planner = plannerAStarGrid(___,Name,Value)
예를 들어 plannerAStarGrid(map,'GCost','Manhattan')은 Manhattan 비용 함수를 사용하여 A* 경로 planner 객체를 생성합니다.
속성
객체 함수
예제
A* 경로 계획 알고리즘을 사용하여 장애물 그리드 맵에서 충돌 없는 최단 경로를 계획합니다.
mapClutter 함수를 사용하여 무작위로 흩어진 장애물이 있는 binaryOccupancyMap 객체를 생성합니다.
rng('default');
map = mapClutter;맵을 사용하여 plannerAStarGrid 객체를 만듭니다.
planner = plannerAStarGrid(map);
출발 지점과 목표 지점을 정의합니다.
start = [2 3]; goal = [248 248];
출발 지점부터 목표 지점에 이르는 경로를 계획합니다.
plan(planner,start,goal);
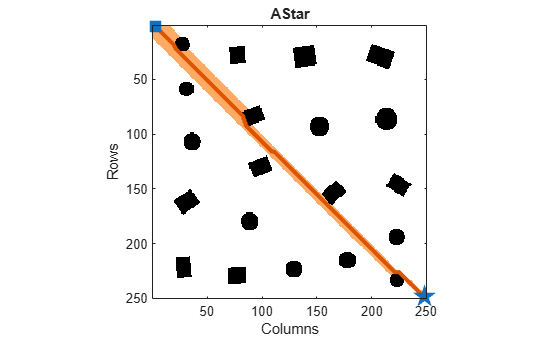
show 객체 함수를 사용하여 경로와 탐색된 노드를 시각화합니다.
show(planner)
확장 기능
버전 내역
R2020b에 개발됨