plan
Find shortest obstacle-free path between two points
Syntax
Description
Examples
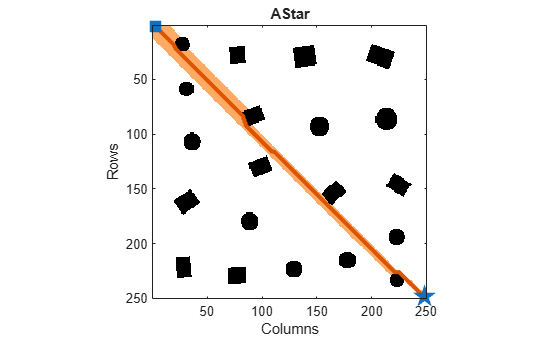
Plan the shortest collision-free path through an obstacle grid map using the A* path planning algorithm.
Generate a binaryOccupancyMap object with randomly scattered obstacles using the mapClutter function.
rng('default');
map = mapClutter;Use the map to create a plannerAStarGrid object.
planner = plannerAStarGrid(map);
Define the start and goal points.
start = [2 3]; goal = [248 248];
Plan a path from the start point to the goal point.
plan(planner,start,goal);
Visualize the path and the explored nodes using the show object function.
show(planner)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b