Model Predictive Control Toolbox 시작하기
Model Predictive Control Toolbox™는 모델 예측 제어(MPC)를 개발하는 데 사용할 수 있는 함수, 앱, Simulink® 블록, 참조 예제를 제공합니다. 선형 문제의 경우, 이 툴박스는 묵시적 MPC, 명시적 MPC, 적응형 MPC, 이득 스케줄링이 적용된 MPC의 설계를 지원합니다. 비선형 문제의 경우, 단일 단계 및 다중 단계 비선형 MPC를 구현할 수 있습니다. 이 툴박스는 배포 가능한 최적화 솔버를 제공하며, 여기서 사용자 지정 솔버도 사용할 수 있습니다.
폐루프 시뮬레이션을 실행하여 MATLAB® 및 Simulink에서 제어기 성능을 평가할 수 있습니다. 자율주행의 경우, 제공된 MISRA C™ 및 ISO 26262 준수 블록과 예제를 사용하여 차선 유지 보조, 경로 계획, 경로 추종 및 적응형 크루즈 컨트롤 애플리케이션을 빠르게 시작할 수 있습니다.
이 툴박스는 C 및 CUDA® 코드와 IEC 61131-3 Structured Text 생성을 지원합니다.
튜토리얼
- Design Controller Using MPC Designer
Design a model predictive controller for a continuous stirred-tank reactor (CSTR) using MPC Designer.
- Design MPC Controller in Simulink
Design and simulate a model predictive controller for a Simulink model using MPC Designer.
- 명령줄에서 MPC 제어기 설계하기
MATLAB 명령줄에서 모델 예측 제어기를 설계하고 시뮬레이션합니다.
- Model Predictive Control of a Single-Input-Single-Output Plant
Create and simulate a model predictive controller for a SISO plant.
- Model Predictive Control of Multi-Input Single-Output Plant
Create and simulate a model predictive controller for a plant with multiple inputs and a single output.
- Model Predictive Control of a Multi-Input Multi-Output Nonlinear Plant
Create and simulate a model predictive controller for a MIMO plant.
모델 예측 제어 정보
- What Is Model Predictive Control?
Introduction to MPC main concepts.
- MPC Signal Types
Plant inputs are independent variables that affect the plant, and plant outputs are dependent variables that you want to control or monitor.
- MPC Prediction Models
Model predictive controllers use plant, disturbance, and noise models for prediction and state estimation.
- Controller State Estimation
MPC controllers use their current state as the basis for predictions. In general, the controller states are unmeasured and must be estimated.
- QP Optimization Problem for Linear MPC
Model predictive controllers compute optimal manipulated variable control moves by solving a quadratic program at each control interval.
- QP Solvers for Linear MPC
The model predictive controller QP solvers convert an MPC optimization problem to a general form quadratic programming problem.
비디오
MPC를 사용하는 이유
모델 예측 제어를 사용할 경우의 이점을 이해합니다.
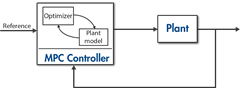
MPC란?
모델 예측 제어의 작동 원리를 이해합니다.

MPC 설계 파라미터
샘플 시간, 지평(horizon), 조정 가중치, 제약 조건 등 일반적인 MPC 설계 파라미터를 이해합니다.