이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
projectLidarPointsOnImage
영상 좌표 프레임에 라이다 포인트 클라우드 데이터 투영
구문
설명
imPts = projectLidarPointsOnImage(ptCloudIn,intrinsics,tform)tform과 일련의 카메라 내부 파라미터 intrinsics를 사용하여 영상 좌표 프레임에 라이다 포인트 클라우드 데이터를 투영합니다. 출력 imPts는 영상 프레임에 투영된 점들의 2차원 좌표를 포함합니다.
imPts = projectLidarPointsOnImage(worldPoints,intrinsics,tform)
[___] = projectLidarPointsOnImage(___,는 위에 열거된 구문의 인수 조합 외에 하나 이상의 이름-값 인수를 사용하여 옵션을 지정합니다. 예를 들어 Name,Value)'ImageSize',[250 400]은 점들이 투영될 영상의 크기를 250×400 픽셀로 설정합니다.
예제
MAT 파일에 있는 ground truth 데이터를 작업 공간으로 불러옵니다. ground truth 데이터에서 영상 데이터와 포인트 클라우드 데이터를 추출합니다.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','sampleColoredPtCloud.mat'); gt = load(dataPath); img = gt.im; pc = gt.ptCloud;
ground truth 데이터에서 카메라 내부 파라미터를 추출합니다.
intrinsics = gt.camParams;
ground truth 데이터로부터 카메라에서 라이다로의 변환 행렬을 추출하고, 역변환하여 라이다에서 카메라로의 변환 행렬을 구합니다.
tform = invert(gt.tform);
포인트 클라우드 데이터를 다운샘플링합니다.
p1 = pcdownsample(pc,'gridAverage',0.5);영상 프레임에 포인트 클라우드를 투영합니다.
imPts = projectLidarPointsOnImage(p1,intrinsics,tform);
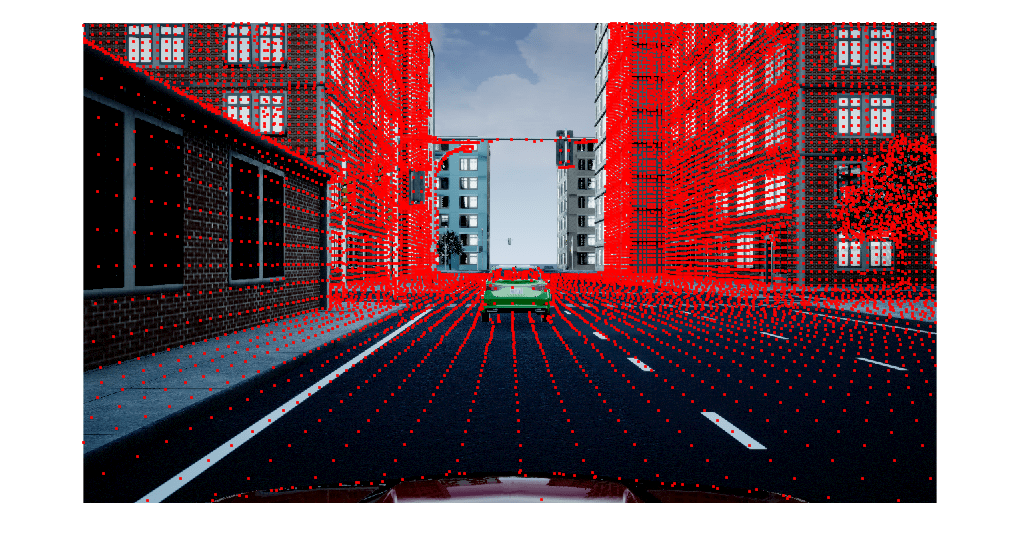
투영된 점들을 영상에 겹칩니다.
figure imshow(img) hold on plot(imPts(:,1),imPts(:,2),'.','Color','r') hold off