estimateCheckerboardCorners3d
(To be removed) Estimate world frame coordinates of checkerboard corner points in image
estimateCheckerboardCorners3destimateBoardCornersCamera function instead. (since R2026a)
Syntax
Description
boardCorners = estimateCheckerboardCorners3d(I,cameraIntrinsic,checkerSize)I, by using the camera intrinsic parameters
cameraIntrinsic and the size of the checkerboard squares
checkerSize.
[
additionally returns the checkerboard size boardCorners,boardSize] = estimateCheckerboardCorners3d(I,cameraIntrinsic,checkerSize)boardSize.
[
estimates the world frame coordinates of the corner points of a checkerboard from a set of
image files, boardCorners,boardSize,imagesUsed] = estimateCheckerboardCorners3d(imageFileNames,cameraIntrinsic,checkerSize)imageFileNames. The function returns a logical vector that
indicates in which images it detected a checkerboard, imagesUsed, in
addition to output arguments from previous syntaxes.
[___] = estimateCheckerboardCorners3d(
estimates the world frame coordinates of the corner points of a checkerboard from an array
of images, imageArray,cameraIntrinsic,checkerSize)imageArray.
[___] = estimateCheckerboardCorners3d(___,
specifies options using one or more name-value pair arguments in addition to any combination
of arguments from previous syntaxes. For example, Name,Value)'MinCornerMetric',0.2
sets the threshold for the checkerboard corner metric to 0.2.
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'MinCornerMetric',0.2 sets the threshold for the checkerboard
corner metric to 0.2.
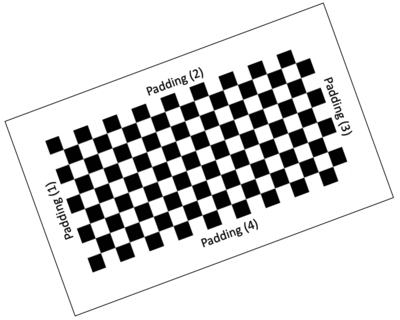
Padding along each side of checkerboard, specified as the comma-separated pair
consisting of 'Padding' and a four-element row vector of
nonnegative values in millimeters.
The figure shows how the elements of the vector pad the sides.
Checkerboard Padding
Data Types: single | double
Threshold for the checkerboard corner metric, specified as the comma-separated
pair consisting of 'MinCornerMetric' and a nonnegative scalar.
Using a higher threshold value can reduce the number of false detections in a noisy or
highly textured image.
Data Types: single | double
Display function progress in a progress bar, specified as the comma-separated pair
consisting of 'ShowProgressBar' and a logical
false or true.
Data Types: logical
Output Arguments
Limitations
Partial detection of checkerboard is not supported.
Algorithms
The algorithm first detects the checkerboard keypoints in the image and undistorts them using the provided camera intrinsics input. It then generates world points based on the checkerboard pattern dimensions. Using the undistorted image keypoints, generated world points, and camera intrinsics, the algorithm estimates the camera extrinsics. The board corners are estimated by extending from the origin keypoint according to the board size and padding. Finally, these board corners are transformed from the world coordinate frame to the camera coordinate frame using the estimated extrinsics.