dsp.CICCompensationInterpolator
Compensate for CIC interpolation filter using FIR interpolator
Description
You can compensate for the shortcomings of a CIC interpolator, namely its passband droop and wide transition region, by preceding it with a compensation interpolator. This System object™ lets you design and use such a filter.
To compensate for the shortcomings of a CIC filter using an FIR interpolator:
Create the
dsp.CICCompensationInterpolatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
ciccompint = dsp.CICCompensationInterpolatorciccompint, that applies an FIR interpolator to each
channel of an input signal. Using the properties of the object, the interpolation filter
can be designed to compensate for a subsequent CIC filter.
ciccompint = dsp.CICCompensationInterpolator(interp)ciccompint, with the
InterpolationFactor property set to
interp.
ciccompint = dsp.CICCompensationInterpolator(cic)ciccompint, with the
CICRateChangeFactor, CICNumSections, and
CICDifferentialDelay properties specified in the
dsp.CICInterpolator
System object
cic.
ciccompint = dsp.CICCompensationInterpolator(cic,interp)ciccompint, with the
CICRateChangeFactor, CICNumSections, and
CICDifferentialDelay properties specified in the
dsp.CICInterpolator
System object
cic, and the InterpolationFactor property set to
interp.
ciccompint = dsp.CICCompensationInterpolator(___,PropertyName=Value)CICRateChangeFactor as 8.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a dsp.CICCompensationDecimator object with default settings. While creating the object, set the NormalizedFrequency property to true so that the passband and the stopband frequencies are in normalized frequency units.
CICCompInterp = dsp.CICCompensationInterpolator(...
NormalizedFrequency=true)CICCompInterp =
dsp.CICCompensationInterpolator with properties:
CICRateChangeFactor: 2
CICNumSections: 2
CICDifferentialDelay: 1
InterpolationFactor: 2
NormalizedFrequency: true
DesignForMinimumOrder: true
PassbandFrequency: 0.1667
StopbandFrequency: 0.6667
PassbandRipple: 0.1000
StopbandAttenuation: 60
Show all properties
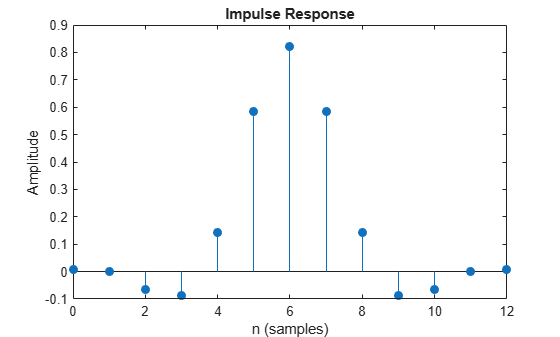
Plot the impulse response of the filter. The zeroth order coefficient is delayed by 7 samples, which is equal to the group delay of the filter.
impz(CICCompInterp)
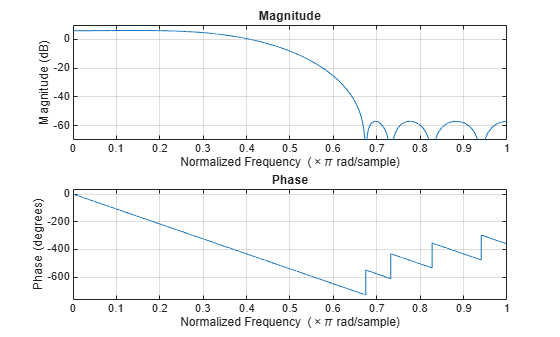
Plot the magnitude and phase responses of the filter.
freqz(CICCompInterp)
Design a compensation interpolator for an existing CIC interpolator having six sections and an interpolation factor of 16.
CICInterp = dsp.CICInterpolator(InterpolationFactor=16,...
NumSections=6)CICInterp =
dsp.CICInterpolator with properties:
InterpolationFactor: 16
DifferentialDelay: 1
NumSections: 6
FixedPointDataType: 'Full precision'
Construct the compensation interpolator. Specify an interpolation factor of 2, an input sample rate of 600 Hz, a passband frequency of 100 Hz, and a stopband frequency of 250 Hz. Set the minimum attenuation of alias components in the stopband to be at least 80 dB.
fs = 600; fPass = 100; fStop = 250; ast = 80; CICCompInterp = dsp.CICCompensationInterpolator(CICInterp,... InterpolationFactor=2,PassbandFrequency=fPass, ... StopbandFrequency=fStop,StopbandAttenuation=ast, ... SampleRate=fs)
CICCompInterp =
dsp.CICCompensationInterpolator with properties:
CICRateChangeFactor: 16
CICNumSections: 6
CICDifferentialDelay: 1
InterpolationFactor: 2
NormalizedFrequency: false
DesignForMinimumOrder: true
PassbandFrequency: 100
StopbandFrequency: 250
PassbandRipple: 0.1000
StopbandAttenuation: 80
SampleRate: 600
Show all properties
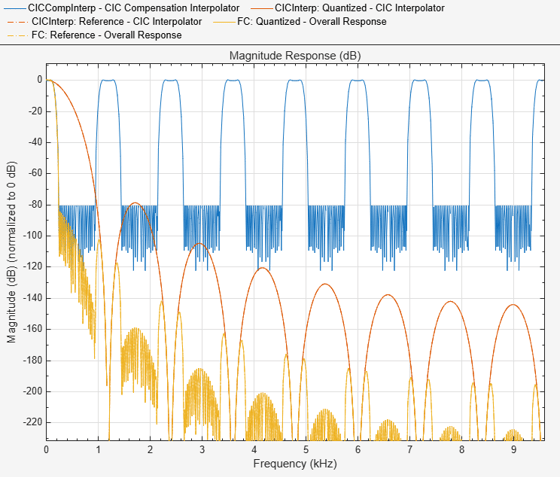
Visualize the frequency response of the cascade. Normalize all magnitude responses to 0 dB.
FC = dsp.FilterCascade(CICCompInterp, CICInterp); f = filterAnalyzer(CICCompInterp,CICInterp,FC,... SampleRates=[fs*2 fs*16*2 fs*16*2],NormalizeMagnitude=true); setLegendStrings(f,["CIC Compensation Interpolator","CIC Interpolator", ... "Overall Response"]);
Apply the design to a 1000-sample random input signal.
x = dsp.SignalSource(fi(rand(1000,1),1,16,15),SamplesPerFrame=100); y = fi(zeros(32000,1),1,32,20); for ind = 1:10 x2 = CICCompInterp(x()); y(((ind-1)*3200)+1:ind*3200) = CICInterp(x2); end
More About
Algorithms
The response of a CIC filter is given by:
R, D, and N are the rate change factor, the differential delay, and the number of sections in the CIC filter, respectively.
After decimation, the CIC response has the form:
The normalized version of this last response is the one that the CIC compensator needs to compensate. Hence, the passband response of the CIC compensator should take the following form:
where ωp is the passband frequency of the CIC compensation filter.
Notice that when ω/2R ≪ π, the previous equation for Hciccomp(ω) can be simplified using the fact that sin(x) ≅ x:
This previous equation is the inverse sinc approximation to the true inverse passband response of the CIC filter.
Extended Capabilities
Version History
Introduced in R2014bSee Also
Functions
freqz|freqzmr|filterAnalyzer|info|cost|coeffs|polyphase|outputDelay|setInputSampleRate