RoadRunner Scenario 시뮬레이션
RoadRunner Scenario는 자율주행 시스템의 시뮬레이션과 테스트를 위한 시나리오를 설계할 수 있는 대화형 방식 편집기입니다. Automated Driving Toolbox™는 장면과 시나리오를 프로그래밍 방식으로 관리할 수 있는 툴을 제공합니다. 이 툴박스는 MATLAB®과 Simulink®에서 모델링된 액터를 사용하여 RoadRunner Scenario에서 시나리오를 시뮬레이션하기 위한 프레임워크도 제공합니다.
RoadRunner Scenario 시뮬레이션 워크플로에서는 다음을 수행할 수 있습니다.
MATLAB 명령을 사용하여 RoadRunner Scenario 시뮬레이션을 제어할 수 있습니다.
시뮬레이션 로그에서 액터 자세, 속도, 기타 변수를 가져오고 분석할 수 있습니다.
RoadRunner Scenario 시뮬레이션에서 센서를 차량 액터와 통합하고 MATLAB 또는 Simulink에서 생성된 센서 데이터를 처리할 수 있습니다.
Simulink 및 MATLAB 의System object™ 동작을 생성할 수 있습니다.
이러한 동작을 RoadRunner Scenario의 액터에 연결하여 파라미터를 조정하고 시나리오를 시뮬레이션하여 동작을 관찰할 수 있습니다.
선택적으로, Simulink 및 MATLAB의 System object 동작을 프로토 파일이나 패키지로 퍼블리시할 수 있습니다.
RoadRunner를 MATLAB과 함께 사용하려면 Connect MATLAB and RoadRunner to Control and Analyze Simulations 항목을 참조하십시오.
MATLAB과 Simulink에서 모델링된 액터를 사용하여 RoadRunner Scenario를 시뮬레이션하는 방법에 대한 자세한 내용은 Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink 항목을 참조하십시오.
주요 항목
- Get Started with MATLAB Functions for Scenario Authoring
- Simulate a RoadRunner Scenario Using MATLAB Functions
- Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink
- Simulate RoadRunner Scenarios with Observers Modeled in MATLAB or Simulink
- Simulate RoadRunner Scenarios with Actors Modeled in Simulink
- Add Sensors to RoadRunner Scenario Using Simulink
카테고리
- 장면 작성을 위한 MATLAB 함수
MATLAB을 사용하여 액터, 논리 단계, 웨이포인트와 같은 RoadRunner 시나리오 요소를 생성하고 수정합니다.
- 시나리오 작성을 위한 MATLAB 함수
MATLAB을 사용하여 액터, 논리 단계, 웨이포인트와 같은 RoadRunner 시나리오 요소를 생성하고 수정합니다.
- 프로그래밍 방식으로 장면과 시나리오 관리
roadrunner객체를 사용하여 프로그래밍 방식으로 장면과 시나리오를 열고, 가져오고, 관리합니다.
- MATLAB 및 Simulink를 사용하여 RoadRunner Scenario 시뮬레이션하기
MATLAB 및 Simulink 동작 개발, 액터 동작 퍼블리시, RoadRunner Scenario 시뮬레이션에서 동작 시뮬레이션, 시뮬레이션 제어, 시뮬레이션 파라미터에 액세스
추천 예제
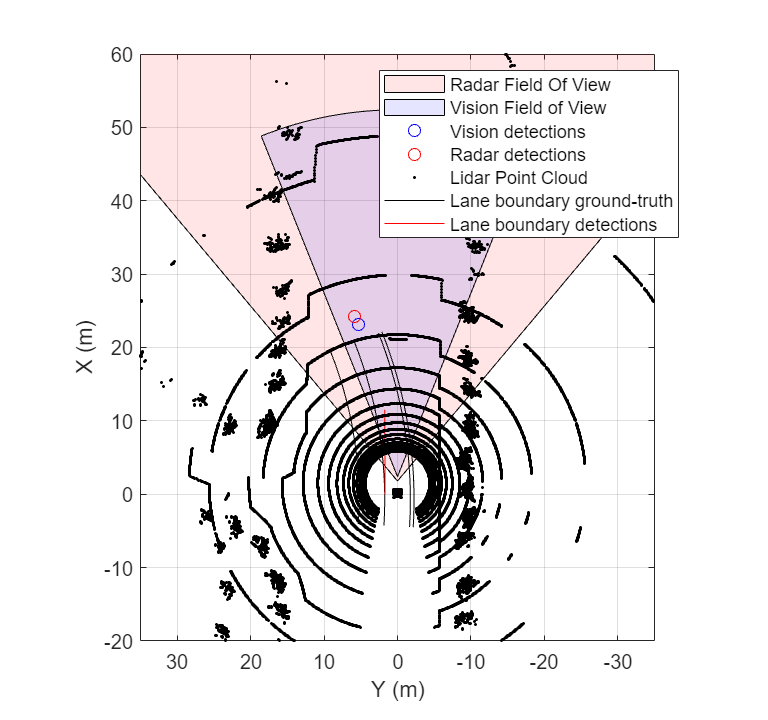
Add Sensors to RoadRunner Scenario Using MATLAB
Simulate a RoadRunner Scenario with sensor models defined in MATLAB and visualize object and lane detections.

Add Sensors to RoadRunner Scenario Using Simulink
Simulate a RoadRunner Scenario with sensor models defined in Simulink and visualize object and lane detections.

Trajectory Follower with RoadRunner Scenario
Cosimulate RoadRunner Scenario with Simulink to control the speed of trajectory following vehicle in RoadRunner Scenario.

Autonomous Emergency Braking with RoadRunner Scenario
Simulate autonomous emergency braking (AEB) system, designed in Simulink, with RoadRunner Scenario.

Highway Lane Change Planner with RoadRunner Scenario
Simulate a highway lane change planner, designed in Simulink, with RoadRunner Scenario.

Autonomous Emergency Braking with High-Fidelity Vehicle Dynamics
Design autonomous emergency braking system with 14DOF vehicle dynamics in Simulink and cosimulate with RoadRunner Scenario.
Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink, with RoadRunner Scenario.

Lane-Keeping System for Self-Driving Trucks
Design a lane-keeping system for self-driving trucks in Simulink and simulate it with RoadRunner Scenario.

Traffic Signal Follower with RoadRunner Scenario
Design a traffic signal follower in Simulink and cosimulate it with RoadRunner Scenario.