LTI System
Simulink에서 선형 시불변 시스템 모델 객체 사용
라이브러리:
Control System Toolbox
설명
LTI System 블록은 선형 시스템 모델 객체를 Simulink® 환경으로 가져옵니다. 가져올 LTI 모델을 LTI 시스템 변수 파라미터에 지정합니다. 어떤 유형의 적정(proper) 선형 시불변 동적 시스템 모델이라도 가져올 수 있습니다. 가져온 시스템이 상태공간(ss) 모델인 경우 초기 상태 파라미터에 초기 상태 값을 지정할 수 있습니다.
예제
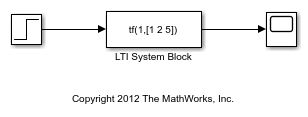
LTISystemBlockSimulation 모델은 LTI System 블록을 사용하여 SISO 전달 함수의 계단 입력에 대한 응답을 시뮬레이션하는 방법을 보여줍니다.
LTI System 블록에 대한 모델을 지정하려면 LTI 시스템 변수 블록 파라미터를 다음 중 하나로 설정하십시오.
MATLAB® 작업 공간 또는 모델 작업 공간 내 LTI 모델의 변수 이름(예:
sys).LTI 모델로 평가되는 MATLAB 표현식(예:
tf(1,[1 1])).
예를 들어, 상태공간( ss ), 영점-극점-이득( zpk ), 또는 전달 함수( tf ) 모델을 지정할 수 있습니다. SISO 모델 또는 MIMO 모델, 그리고 연속시간 모델 또는 이산시간 모델을 시뮬레이션할 수 있습니다.
LTISystemBlockSimulation 모델에서 LTI 시스템 변수 파라미터는 연속시간 SISO 전달 함수를 생성하는 MATLAB 표현식인 tf(1,[1 2 5])입니다. 지정된 시스템이 상태공간(ss) 모델인 경우, 초기 상태 파라미터를 설정하여 초기 상태 값을 지정할 수 있습니다.
모델을 시뮬레이션하고, 결과를 스코프에서 확인하십시오.

이 예제는 t = 2초에 가해진 계단 입력에 대한 시스템 응답을 시뮬레이션합니다. LTI System 블록을 사용하여 Simulink 모델의 어느 위치에서든 LTI 모델 객체를 가져와 임의의 입력에 대한 선형 시스템 응답을 시뮬레이션하십시오.
이 모델은 Simulink®에서 MIMO 선형 시스템을 표현하기 위해 LTI System 블록을 사용하는 방법을 보여줍니다.
LTI System 블록은 블록에 MIMO 모델을 지정하더라도 하나의 입력과 하나의 출력만을 가집니다. 그 경우 블록의 입력 및 출력은 벡터 신호가 됩니다. 예를 들어, 모델 LTISystemBlockMIMO는 제어 시스템에서 MIMO 플랜트를 표현하기 위해 LTI 시스템 블록을 사용합니다.
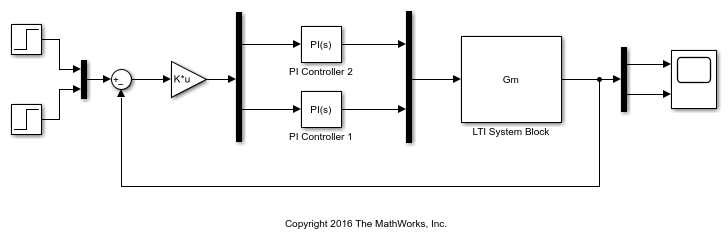
이 모델에서 블록에 지정된 LTI 시스템은 Gm로, 모델 작업 공간에 저장된 2-출력, 2-입력 전달 함수 모델입니다. Mux 블록은 두 컨트롤러 출력을 벡터 신호로 결합하여 LTI System 블록 입력으로 전달합니다. 마찬가지로, Demux 블록은 LTI System 블록의 벡터 출력을 두 개의 스칼라 신호로 분리합니다.
모델을 시뮬레이션하고, 결과를 스코프에서 확인하십시오.

이 예제는 첫 번째 입력에서 t = 50초 단계 변화와 두 번째 입력에서 t = 150초 단계 변화에 대한 폐루프 시스템 응답을 시뮬레이션합니다. LTI 시스템 블록은 Simulink 모델에 LTI 시스템을 삽입하고자 하는 어디에서나 사용할 수 있습니다.