이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
LPV System
선형 파라미터 가변(LPV) 시스템 시뮬레이션
라이브러리:
Control System Toolbox /
Linear Parameter Varying
설명
선형 파라미터 가변(LPV) 시스템은 동특성이 스케줄링 파라미터라는 특정 시변 파라미터에 따라 변하는 선형 상태공간 모델입니다. MATLAB®에서 LPV 모델은 파라미터에 종속된 계수를 사용하여 상태공간 형식으로 표현됩니다.
LPV 시스템을 다음과 같이 수학적으로 표현할 수 있습니다.
여기서 각각은 다음을 나타냅니다.
u(t)는 입력입니다
y(t)는 출력입니다
x(t)는 초기값이 xinit인 모델 상태입니다
는 연속시간 시스템에서는 상태 도함수 벡터 이고 이산시간 시스템에서는 상태 업데이트 벡터 x[k+1]입니다. 여기서 k는 샘플링 주기 Ts의 개수를 세는 정수 인덱스입니다.
A(p), B(p), C(p) 및 D(p)는 스케줄링 파라미터 벡터 p로 파라미터화된 상태공간 행렬입니다.
파라미터 p = p(t)는 모델의 입력 및 상태의 함수로서, 측정 가능한 함수입니다. 이러한 파라미터는 스칼라 양이거나, 몇몇 파라미터로 구성된 벡터일 수 있습니다. 일련의 스케줄링 파라미터는 LPV 모델이 정의된 스케줄링 공간을 정의합니다.
dx0(p), x0(p), u0(p) 및 y0(p)는 지정된 파라미터 값 p = p(t) 또는 p[k]에서 , x(t), u(t) 및 y(t) 값의 오프셋입니다.
linearize(Simulink Control Design) 또는getIOTransfer(Simulink Control Design) 같은 함수를 호출할 때 추가 선형화 정보를 반환하여 오프셋을 얻을 수 있습니다. 예제는 LPV Approximation of Boost Converter Model (Simulink Control Design) 항목을 참조하십시오.
주의
C(p) 및 D(p)를 시스템 출력값 y에 종속되게 하지 마십시오. 그렇게 하지 않으면 출력값 y를 계산할 때 출력값을 알아야 하기 때문에, 결과로 생성된 상태공간 방정식 y = C(y)x + D(y)u에서 대수 루프가 생성됩니다. 이 대수 루프는 불안정하고 발산되기 쉽습니다. 대신 C와 D를 시간 t와 블록 입력 u 및 상태 출력 x로 표현해 보십시오.
유사한 이유로, dx 출력에 따라 A(p)와 B(p)를 스케줄링하는 일은 피하십시오. 참고로, y가 상태와 입력의 고정 조합인 경우(즉, y = Cx + Du인 경우. 여기서 C와 D는 상수 행렬임) A와 B가 y에 종속되는 것이 안전합니다.
블록은 LPV 시스템의 그리드 기반 표현을 구현합니다. 스케줄링 파라미터에 대한 값으로 구성된 그리드를 선택할 수 있습니다. 각각의 값 p = p*에서, 대응하는 선형 시스템을 상태공간(ss 또는 idss (System Identification Toolbox)) 모델 객체로 지정할 수 있습니다. 생성된 상태공간 모델의 배열을 사용하여 LPV System 블록을 구성할 수 있습니다.
블록은 동작점 정보가 있는 상태공간 모델의 배열을 받습니다. 블록은 LTI 배열의 SamplingGrid 속성에서 스케줄링 변수에 대한 정보를 추출합니다. 스케줄링 변수는 LPV 모델의 그리드를 정의합니다. 스케줄링 변수는 스칼라 값의 양으로, 시간, 입력 및 상태의 함수이거나 상수일 수 있습니다. 이는 동작 공간에서 국부적인 동특성을 선택하는 데 사용됩니다. 이러한 변수의 값은 보간됩니다. 블록은 시뮬레이션을 위해 데이터 보간과 외삽 기법에 이 배열을 사용합니다.
예제
2-입력, 3-출력, 4-상태 LPV 모델이 있다고 가정하겠습니다. 입력 u(2)와 상태 x(1)을 스케줄링 파라미터로 사용합니다. 다음 그림에 나와 있는 것처럼 Simulink® 모델을 구성합니다.

질량이 외부 하중 명령의 함수에 의해 변하는 선형 질량-스프링-댐퍼 시스템이 있다고 가정하겠습니다. 적용되는 방정식은 다음과 같습니다.
여기서 는 외부 명령 에 종속된 질량이고, 는 감쇠비이고, 는 스프링의 경직성이고, 는 가해지는 입력입니다. 는 지정된 시간 에서의 질량 위치입니다. 의 고정 값에 대해 시스템은 선형이며 다음과 같이 표현됩니다.
,
여기서 는 상태 벡터이고 은 의 지정된 값에 대한 질량 값입니다.
이 예제에서는 1볼트에서 10볼트까지의 입력값 범위에서 모델 동작을 조사해 보겠습니다. 의 각 값에 대해 질량을 측정하고 시스템의 선형 표현을 계산합니다. 이때 질량과 입력의 관계가 이라고 가정하겠습니다. 1부터 10까지 범위의 u 값에 대해 다음과 같은 선형 시스템으로 구성된 배열이 생성됩니다.
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
변수 는 스케줄링 입력입니다. 이 정보를 모델에 추가합니다.
sys.SamplingGrid = struct('LoadCommand',u);다음과 같이 LPV System 블록을 구성합니다.
상태공간 배열 필드에
sys를 입력합니다.하중 명령의 값을 생성하는 1차원 소스 신호에 입력 포트
par을 연결합니다. 소스가 1에서 10 사이의 값을 제공하면, 블록은 주어진 시점에서 선형 모델을 계산하기 위해 보간을 사용합니다. 그 외의 경우 블록은 외삽을 사용합니다.

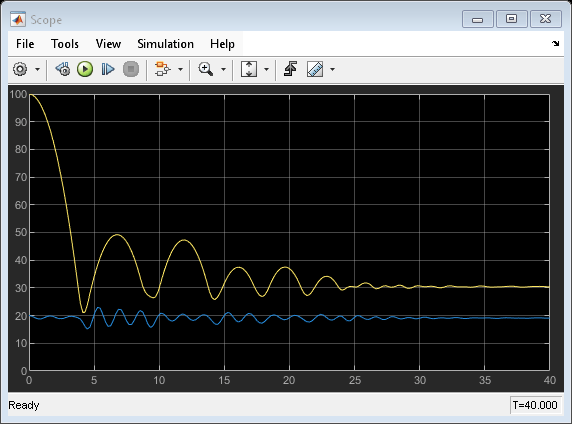
일정하게 가해지는 입력 100N과 하중 명령 스케줄링 변수에 대한 난수 값으로 LPV 모델을 시뮬레이션합니다.
model = "simMSDLPV";
open_system(model);

이 예제에서는 LPV System 블록을 사용하여 엔진 속도의 선형 파라미터 가변(LPV) 모델을 시뮬레이션하는 방법을 보여줍니다. LPV System 블록은 상태공간 배열을 보간하여 LPV 응답을 모델링합니다. 일반적으로, 다양한 동작 조건에 대해 비선형 모델을 배치(일괄) 선형화하여 이러한 배열을 얻을 수 있습니다. 이 예제는 scdspeedlpvData에서 엔진 속도 모델의 선형화된 결과를 제공합니다. 이 모델의 선형화에 대한 자세한 내용은 Linearize Engine Speed Model (Simulink Control Design) 항목을 참조하십시오.
모델을 엽니다.
model = "scdspeedLPVCompare";
open_system(model);
LPV 모델 구현을 위해 선형화 결과를 불러옵니다.
load scdspeedlpvData.matLPV 모델은 LPV Model 서브시스템 아래에 구현됩니다.

LPV System 블록은 스로틀 각을 입력으로 받고 속도 출력을 스케줄링 변수로 사용합니다. 블록 파라미터는 아래 이미지에 표시된 것처럼 구성됩니다. 여기서 상태공간 배열 sys와 오프셋은 비선형 모델을 배치 선형화하여 얻습니다.

모델을 시뮬레이션하고 응답 비교를 플로팅합니다.
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")
LPV 모델은 비선형 응답을 적절하게 근사합니다.
확장 예제

LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape™ Electrical™ model using a linear parameter varying model.

Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model.
Using LTI Arrays for Simulating Multi-Mode Dynamics
Construct a Linear Parameter Varying (LPV) representation of a system that exhibits multi-mode dynamics.

Approximate Nonlinear Behavior Using Array of LTI Systems
You can use linear parameter varying models to approximate the dynamics of nonlinear systems.