systune
Tune fixed-structure control systems modeled in MATLAB
Syntax
Description
systune tunes fixed-structure control systems subject to both
soft and hard design goals. systune can tune multiple fixed-order,
fixed-structure control elements distributed over one or more feedback loops. For an overview of
the tuning workflow, see Automated Tuning Workflow.
This command tunes control systems modeled in MATLAB®. For tuning Simulink® models, use slTuner (Simulink Control Design) to create an interface to your
Simulink model. You can then tune the control system with systune (Simulink Control Design) for slTuner.
[
tunes the free parameters of the control system model, CL,fSoft]
= systune(CL0,SoftReqs)CL0, to best meet the
soft tuning requirements. The best achieved soft constraint values are returned as
fSoft. For robust tuning against real parameter uncertainty, use a control
system model with uncertain real parameters. For robust tuning against a set of plant models,
use an array of control system models CL0. (See Input Arguments.)
Examples
Tune a cascaded control system to meet requirements of reference tracking and disturbance rejection.
The cascaded control system of the following illustration includes two tunable controllers, the PI controller for the inner loop, , and the PID controller for the outer loop, .
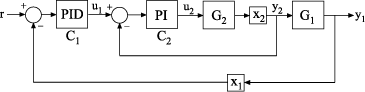
The blocks and mark analysis-point locations. These are locations at which loops can be opened or signals injected for the purpose of specifying requirements for tuning the system.
Tune the free parameters of this control system to meet the following requirements:
The output signal, , tracks the reference signal, , with a response time of 10 seconds and a steady-state error of 1%.
A disturbance injected at is suppressed at by a factor of 10.
Create tunable Control Design Blocks to represent the controllers, and numeric LTI models to represent the plants. Also, create AnalysisPoint blocks to mark the points of interest in each feedback loop.
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2');
Connect these components to build a model of the entire closed-loop control system.
InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
CL0 is a tunable genss model. Specifying names for the input and output channels allows you to identify them when you specify tuning requirements for the system.
Specify tuning requirements for reference tracking and disturbance rejection.
Rtrack = TuningGoal.Tracking('r','y',10,0.01); Rreject = TuningGoal.Gain('X2','y',0.1);
The TuningGoal.Tracking requirement specifies that the signal at 'y' track the signal at 'r' with a response time of 10 seconds and a tracking error of 1%.
The TuningGoal.Gain requirement limits the gain from the implicit input associated with the AnalysisPoint block, X2, to 'y'. (See AnalysisPoint.) Limiting this gain to a value less than 1 ensures that a disturbance injected at X2 is suppressed at the output.
Tune the control system.
[CL,fSoft] = systune(CL0,[Rtrack,Rreject]);
Final: Soft = 1.24, Hard = -Inf, Iterations = 105
systune converts each tuning requirement into a normalized scalar value, f. The command adjusts the tunable parameters of CL0 to minimize the f values. For each requirement, the requirement is satisfied if f < 1 and violated if f >1. fSoft is the vector of minimized f values. The largest of the minimized f values is displayed as Soft.
The output model CL is the tuned version of CL0. CL contains the same Control Design Blocks as CL0, with current values equal to the tuned parameter values.
Validate that the tuned control system meets the tracking requirement by examining the step response from 'r' to 'y'.
stepplot(CL)
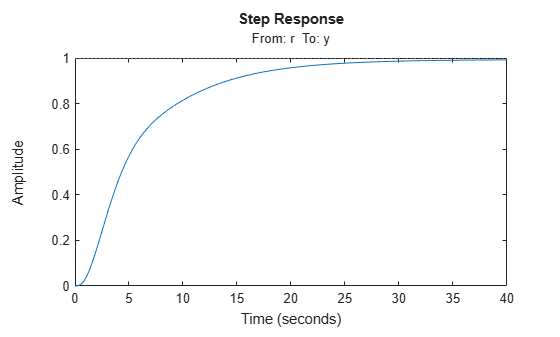
The step plot shows that in the tuned control system, CL, the output tracks the input with approximately the desired response time.
Validate the tuned system against the disturbance rejection requirement by examining the closed-loop response to a signal injected at X2.
CLdist = getIOTransfer(CL,'X2','y'); stepplot(CLdist);
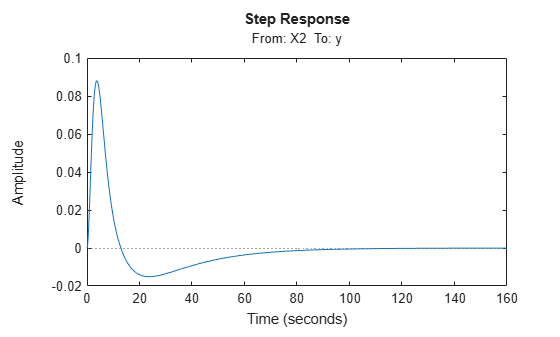
getIOTransfer extracts the closed-loop response from the specified inputs to outputs. In general, getIOTransfer and getLoopTransfer are useful for validating a control system tuned with systune.
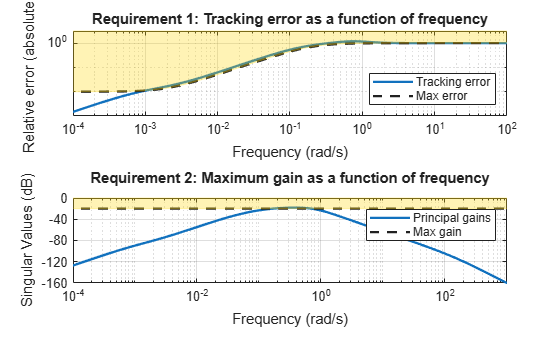
You can also use viewGoal to compare the responses of the tuned control system directly against the tuning requirements, Rtrack and Rreject.
viewGoal([Rtrack,Rreject],CL)
Tune a cascaded control system to meet requirements of reference tracking and disturbance rejection. These requirements are subject to a hard constraint on the stability margins of the inner and outer loops.
The cascaded control system of the following illustration includes two tunable controllers, the PI controller for the inner loop, , and the PID controller for the outer loop, .
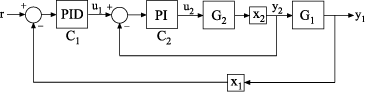
The blocks and mark analysis-point locations. These are locations at which you can open loops or inject signals for the purpose of specifying requirements for tuning the system.
Tune the free parameters of this control system to meet the following requirements:
The output signal, , tracks the reference signal at with a response time of 5 seconds and a steady-state error of 1%.
A disturbance injected at is suppressed at the output, , by a factor of 10.
Impose these tuning requirements subject to hard constraints on the stability margins of both loops.
Create tunable Control Design Blocks to represent the controllers and numeric LTI models to represent the plants. Also, create AnalysisPoint blocks to mark the points of interest in each feedback loop.
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2');
Connect these components to build a model of the entire closed-loop control system.
InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
CL0 is a tunable genss model. Specifying names for the input and output channels allows you to identify them when you specify tuning requirements for the system.
Specify tuning requirements for reference tracking and disturbance rejection.
Rtrack = TuningGoal.Tracking('r','y',5,0.01); Rreject = TuningGoal.Gain('X2','y',0.1);
The TuningGoal.Tracking requirement specifies that the signal at 'y' tracks the signal at 'r' with a response time of 5 seconds and a tracking error of 1%.
The TuningGoal.Gain requirement limits the gain from the implicit input associated with the AnalysisPoint block X2 to the output, 'y'. (See AnalysisPoint.) Limiting this gain to a value less than 1 ensures that a disturbance injected at X2 is suppressed at the output.
Specify tuning requirements for the gain and phase margins.
RmargOut = TuningGoal.Margins('X1',18,60); RmargIn = TuningGoal.Margins('X2',18,60); RmargIn.Openings = 'X1';
RmargOut imposes a minimum gain margin of 18 dB and a minimum phase margin of 60 degrees. Specifying X1 imposes that requirement on the outer loop. Similarly, RmargIn imposes the same requirements on the inner loop, identified by X2. To ensure that the inner-loop margins are evaluated with the outer loop open, include the outer-loop analysis-point location, X1, in RmargIn.Openings.
Tune the control system to meet the soft requirements of tracking and disturbance rejection, subject to the hard constraints of the stability margins.
SoftReqs = [Rtrack,Rreject]; HardReqs = [RmargIn,RmargOut]; [CL,fSoft,gHard] = systune(CL0,SoftReqs,HardReqs);
Final: Soft = 1.13, Hard = 0.97733, Iterations = 113
systune converts each tuning requirement into a normalized scalar value, f for the soft constraints and g for the hard constraints. The command adjusts the tunable parameters of CL0 to minimize the f values, subject to the constraint that each g < 1.
The displayed value Hard is the largest of the minimized g values in gHard. This value is less than 1, indicating that both the hard constraints are satisfied.
Validate the tuned control system against the stability margin requirements.
figure; viewGoal(HardReqs,CL)
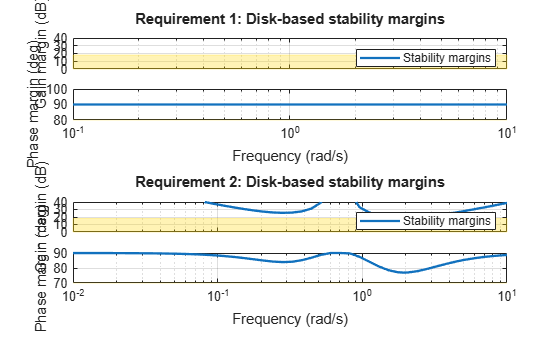
The viewGoal plot confirms that the stability margin requirements for both loops are satisfied by the tuned control system at all frequencies. The blue lines show the margin used in the optimization calculation, which is an upper bound on the actual margin of the tuned control system.
Examine whether the tuned control system meets the tracking requirement by examining the step response from 'r' to 'y'.
figure; stepplot(CL,20)
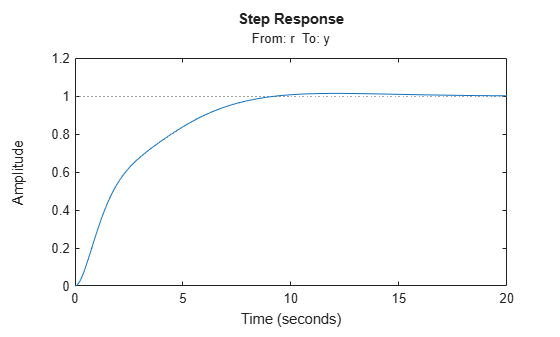
The step plot shows that in the tuned control system, CL, the output tracks the input but the response is somewhat slower than desired and the tracking error may be larger than desired. For further information, examine the tracking requirement directly with viewGoal.
figure; viewGoal(Rtrack,CL)
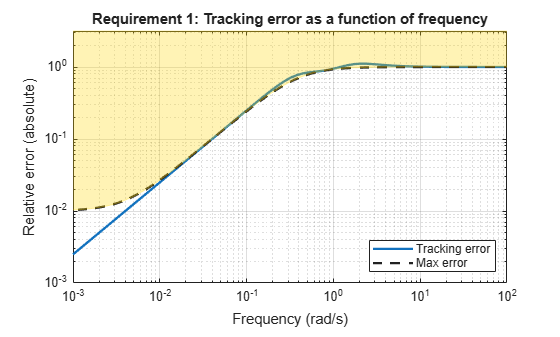
The actual tracking error crosses into the shaded area between 1 and 10 rad/s, indicating that the requirement is not met in this regime. Thus, the tuned control system cannot meet the soft tracking requirement, time subject to the hard constraints of the stability margins. To achieve the desired performance, you may need to relax one of your requirements or convert one or more hard constraints to soft constraints.
Input Arguments
Output Arguments
Algorithms
x is the vector of tunable parameters in
the control system to tune. systune converts each
soft and hard tuning requirement SoftReqs(i) and HardReqs(j) into
normalized values fi(x)
and gj(x),
respectively. systune then solves the constrained
minimization problem:
Minimize subject to , for .
xmin and xmax are the minimum and maximum values of the free parameters of the control system.
When you use both soft and hard tuning goals, the software approaches this optimization problem by solving a sequence of unconstrained subproblems of the form:
The software adjusts the multiplier α so that the solution of the subproblems converges to the solution of the original constrained optimization problem.
systune returns the control system with parameters tuned
to the values that best solve the minimization problem. systune also
returns the best achieved values of fi(x)
and gj(x),
as fSoft and gHard respectively.
For information about the functions fi(x)
and gj(x)
for each type of constraint, see the reference pages for each TuningGoal requirement
object.
systune uses the nonsmooth optimization algorithms described in [1],[2],[3],[4].
systune computes the H∞
norm using the algorithm of [5] and structure-preserving eigensolvers from the SLICOT library. For more information about the
SLICOT library, see https://github.com/SLICOT.
Alternative Functionality
App
The Control System Tuner app provides a graphical interface to control system tuning.
References
[1] Apkarian, P. and D. Noll, "Nonsmooth H-infinity Synthesis," IEEE Transactions on Automatic Control, Vol. 51, No. 1, (2006), pp. 71–86.
[2] Apkarian, P. and D. Noll, "Nonsmooth Optimization for Multiband Frequency-Domain Control Design," Automatica, 43 (2007), pp. 724–731.
[3] Apkarian, P., P. Gahinet, and C. Buhr, "Multi-model, multi-objective tuning of fixed-structure controllers," Proceedings ECC (2014), pp. 856–861.
[4] Apkarian, P., M.-N. Dao, and D. Noll, "Parametric Robust Structured Control Design," IEEE Transactions on Automatic Control, 2015.
[5] Bruinsma, N.A., and M. Steinbuch. "A Fast Algorithm to Compute the H∞ Norm of a Transfer Function Matrix." Systems & Control Letters, 14, no.4 (April 1990): 287–93.
Extended Capabilities
Version History
Introduced in R2012bSee Also
systuneOptions | viewGoal | genss | slTuner (Simulink Control Design) | systune (for slTuner) (Simulink Control Design) | looptune | looptune (for slTuner) (Simulink Control Design) | AnalysisPoint | TuningGoal.Tracking | TuningGoal.Gain | TuningGoal.Margins