
Simulating Robot Throwing Mechanisms
From the series: Modeling, Simulation, and Control
Join Veer Alakshendra and Maitreyee Mordekar as they discuss modeling and simulation of a throwing mechanism relevant to robotics competitions such as Robocon.
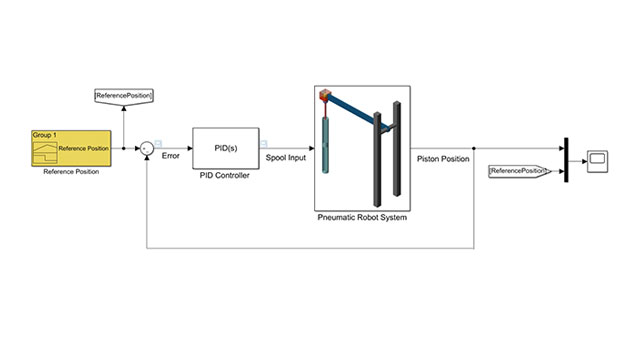
Veer and Maitreyee show you how to build a throwing mechanism to throw a ball at a certain target using Simscape Multibody™. They discuss various components of the system and the contact between the ball and the surfaces. Finally, you’ll see the ball successfully land in the target box when an appropriate input signal is selected for the movement of the piston.
You can find the example models used in this video on MATLAB Central File Exchange.
For more information, you can access the following resources:
Published: 14 Nov 2018











웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다: United States
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)