비디오 플레이어이(가) 로딩 중입니다.
로봇 팔 하드웨어 플랫폼 모델 개발
해당 시리즈: 자율 로봇 시스템 개발을 위한 MATLAB 및 Simulink: 아이디어를 현실로
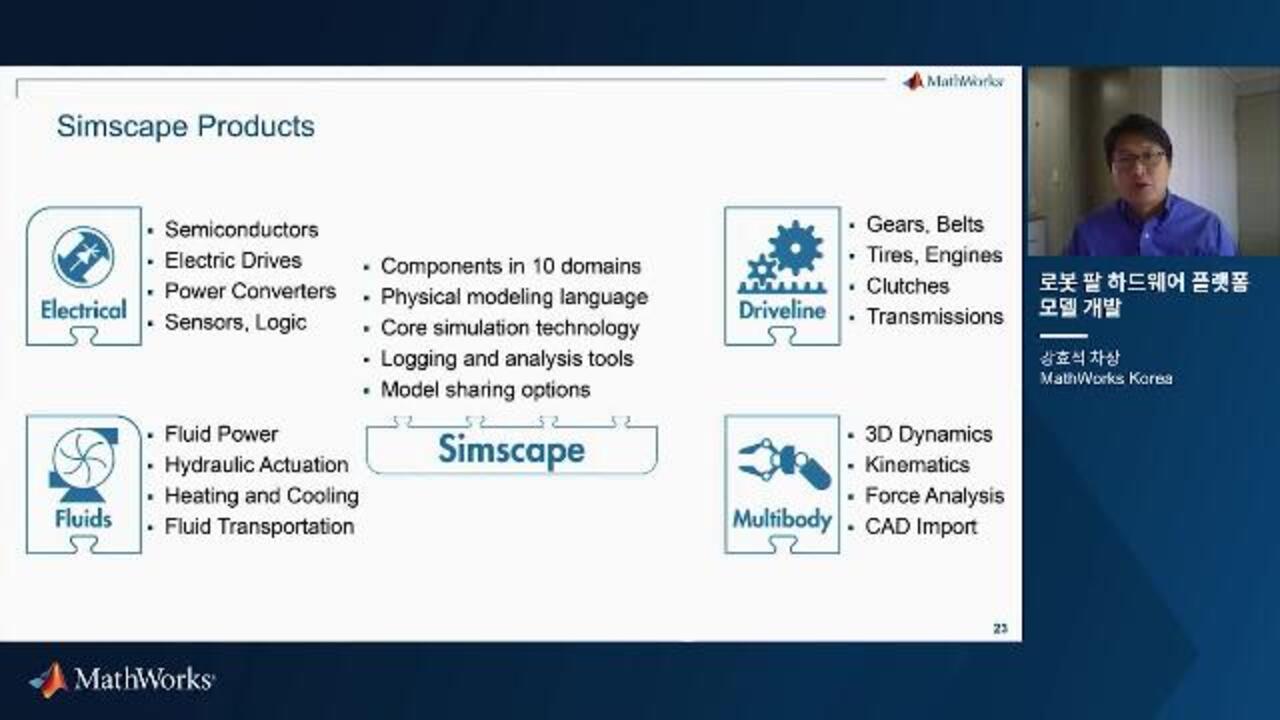
산업용 로봇 팔 개발할 때, 시뮬레이션은 시스템 기능 검증 혹은 AI 시스템의 학습 등 여러 분야에서 물리적 시스템을 대체하면서 점점 더 중요해지고 있습니다. 이런 시뮬레이션은 그 목적에 따라 다양한 정밀도를 갖는 시뮬레이션 모델이 필요한데, 오늘 이 세션에서는 목적에 맞게 적용할 수 있는 저충실도(low fidelity)부터 고충실도(high fidelity)까지 다양한 정밀도의 로봇 모델을 MATLAB®을 통해 만들어보고 어떻게 사용할 수 있는지 알려드립니다.
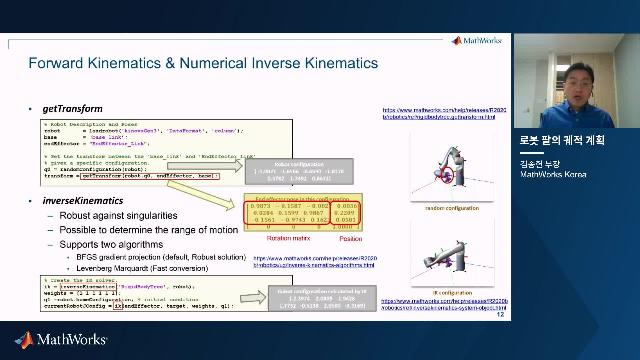
- Rigid Body Tree(RBT)를 이용한 kinematics & dynamics 모델링
- CAD 모델 가져오기를 이용한 고충실도 모델링
- 액츄에이터 사이징
- 시뮬레이션 접촉 처리
발행: 2021년 3월 4일











웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다: United States
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)