Computer Vision Toolbox 시작하기
Computer Vision Toolbox™는 컴퓨터 비전 시스템을 설계하고 테스트하기 위한 알고리즘 및 앱을 제공합니다. 특징 검출, 특징 추출 및 특징 매칭과 더불어 외관 검사, 객체 검출 및 객체 추적을 수행할 수 있습니다. 단일 카메라, 어안 카메라, 스테레오 카메라, 다중 카메라 구성을 위한 보정 워크플로를 자동화할 수 있습니다. 3차원 비전을 위해 스테레오 비전, 포인트 클라우드 처리, 움직임 기반 구조, 실시간 시각 기반 SLAM과 포인트 클라우드 SLAM을 지원합니다. 컴퓨터 비전 앱을 통해, 카메라 보정뿐만 아니라 자동화를 통해 팀 기반의 ground truth 레이블 지정이 가능합니다.
이 툴박스는 사전 훈련된 CNN(컨벌루션 신경망), Vision Transformer, 비전-언어 모델 등 다양한 AI 기법을 제공합니다. 이러한 기본 제공 모델을 사용하여 영상 분류, 객체 검출, 분할, 자세 추정, 캡션 생성, OCR(광학 문자 인식)과 같은 작업을 수행할 수 있으며, 전이 학습을 통해 모델을 추가로 사용자 지정할 수 있습니다.
C 및 C++ 코드, GPU 실행을 위한 코드, HDL(하드웨어 기술 언어) 코드를 생성할 수 있습니다.
튜토리얼
- 카메라 보정이란?
영상 또는 비디오 카메라의 렌즈 및 영상 센서에 대한 파라미터를 추정합니다.
- 움직임 기반 구조란?
2차원 영상 시퀀스에서 3차원 구조를 추정합니다.
- 딥러닝을 사용한 객체 검출 시작하기
YOLOX, YOLO v4, RTMDet, SSD와 같은 딥러닝 신경망을 사용하여 객체 검출을 수행합니다.
- 딥러닝을 사용한 의미론적 분할 시작하기
딥러닝을 사용하여 클래스를 기준으로 객체를 분할합니다.
- Get Started with Code Generation, Deployment, GPU, and OpenCV Support
C/C++ and GPU code generation and acceleration, HDL code generation, and OpenCV interface for MATLAB and Simulink.
- Computer Vision Toolbox with Simulink
Simulink® support for computer vision applications.
앱 및 워크플로 의사 결정 가이드
- Ground Truth 데이터에 레이블을 지정할 앱 선택
ground truth 데이터에 레이블을 지정하기 위해 사용할 앱을 영상 레이블 지정기, 비디오 레이블 지정기, Ground Truth 레이블 지정기, 라이다 레이블 지정기, 신호 레이블 지정기 또는 의료 영상 레이블 지정기 중에서 선택합니다.
- Choose an Object Detector
Compare object detection deep learning models, such as YOLOX, YOLO v4, RTMDet, and SSD.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- 포인트 클라우드 뷰어 선택하기
시각화 함수를 비교합니다.
추천 예제

딥러닝을 사용한 의미론적 분할
이 예제에서는 의미론적 분할 신경망을 사용하여 영상을 분할하는 방법을 보여줍니다.

Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).

Multiclass Object Detection Using YOLO v2 Deep Learning
Train a YOLO v2 multiclass object detector and evaluate object detector performance across selected classes and overlap thresholds.

Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.

3차원 포인트 클라우드 정합 및 이어 붙이기
이 예제에서는 ICP(Iterative Closest Point) 알고리즘을 사용해 여러 포인트 클라우드를 결합하여 3차원 장면을 복원하는 방법을 보여줍니다. 그런 다음 포인트 클라우드의 색 정보를 활용하여 장면의 정확도를 높이는 방법을 보여줍니다.

영상 특징점을 사용하여 복잡한 장면에서 객체 찾기
이 예제에서는 객체의 참조 영상이 주어졌을 때 복잡한 장면에서 특정 객체를 검출하는 방법을 보여줍니다.
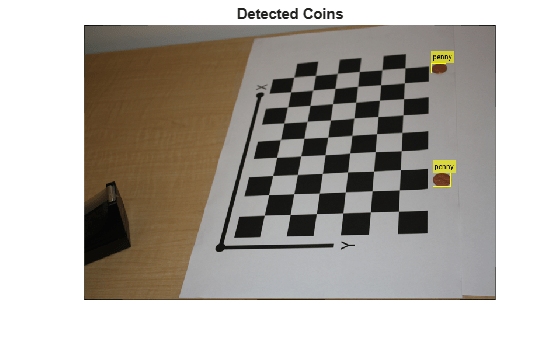
Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.

자동으로 영상 회전과 스케일 구하기
이 예제에서는 두 영상 간의 기하 변환을 자동으로 확인하는 방법을 보여줍니다. 특히 한 영상이 회전과 스케일링으로 인해 다른 영상에 비해 왜곡된 경우, 함수 detectSIFTFeatures와 estgeotform2d를 사용하여 회전 각도와 스케일링 인자를 식별할 수 있습니다. 그런 다음 이러한 파라미터를 사용하여 왜곡된 영상을 원래 모습으로 다시 변환할 수 있습니다.
Motion-Based Multiple Object Tracking
Perform automatic detection and motion-based tracking of moving objects in a video from a stationary camera.
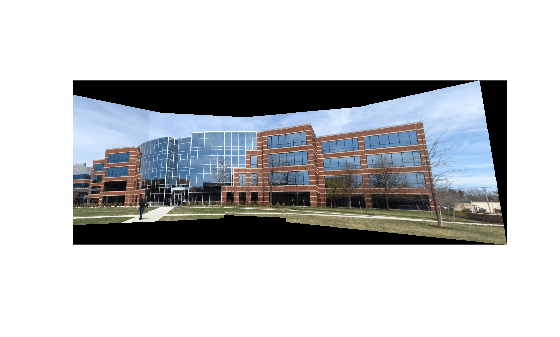
파노라마 만들기
이 예제에서는 여러 영상을 자동으로 이어 붙여서 파노라마로 만드는 방법을 보여줍니다. 영상을 이어 붙이는 절차는 특징 기반 영상 정합의 확장입니다. 단일 영상 쌍을 정합하는 대신 여러 영상 쌍이 서로를 기준으로 연속적으로 정합되어 파노라마를 형성합니다.
대화형 학습

Computer Vision Onramp
Computer Vision Toolbox를 사용해서 객체 검출 및 추적을 수행하는 방법을 알아봅니다.
비디오

컴퓨터 비전이란?
컴퓨터 비전이 객체 검출, 추적, 인식 등 다양한 응용 분야에 어떻게 적용될 수 있는지 알아봅니다.

MATLAB을 사용한 카메라 보정
카메라 보정기 앱을 사용하여 체커보드 검출을 자동화하고 핀홀 카메라와 어안 카메라를 보정
교육 관련 자료

컴퓨터 비전 기본 사항
컴퓨터 비전에서 영상 분할의 기본 사항을 알아봅니다.