Read UAV Trajectory
Generate translation and rotation samples from UAV trajectory for 3D simulation
Since R2024b
Libraries:
UAV Toolbox /
Utilities
Description
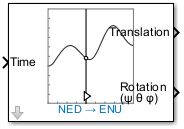
The Read UAV Trajectory block generates translation and rotation samples
from a UAV trajectory that you create using a multirotorFlightTrajectory, fixedwingFlightTrajectory, polynomialTrajectory,
or waypointTrajectory
object.
Use the output of this block for the Translation and Rotation input ports of the Simulation 3D UAV Vehicle block to simulate a UAV trajectory in a 3D simulation environment.
Examples
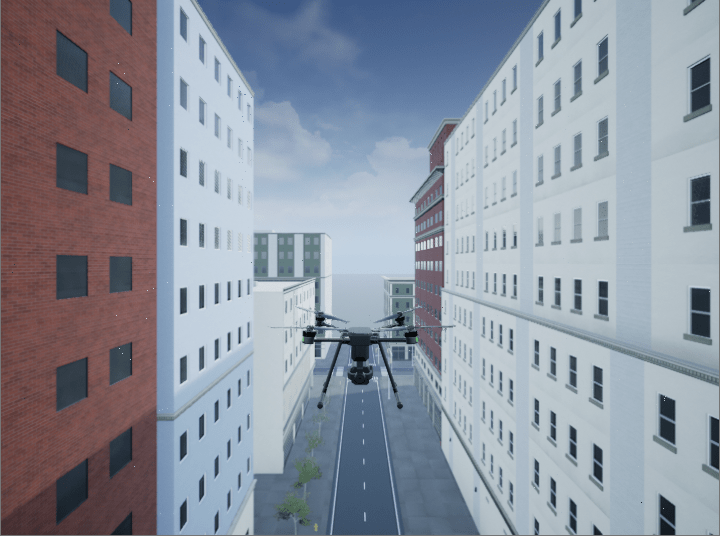
Simulate UAV Scenario Trajectory in Unreal Engine Environment
Design a flight trajectory in a UAV scenario, and simulate the trajectory in a 3D environment using Unreal Engine®.

Design Real-World Trajectory in UAV Scenario and Visualize with Cesium
Design a real-world trajectory in a UAV scenario, and visualize the trajectory in a 3D environment using Cesium.
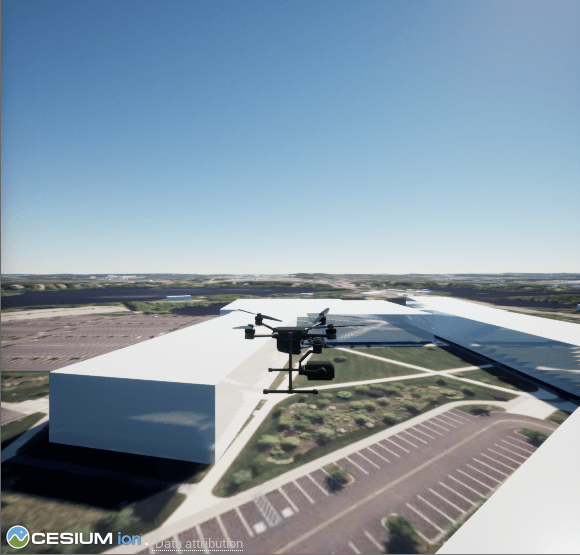
Simulate Flight Plan in Real-World Location Using Cesium
Simulate a flight plan created with QGroundControl in a 3D environment using Cesium.
Ports
Input
Output
Parameters
Version History
Introduced in R2024b