오토파일럿 하드웨어 인터페이스
Pixhawk® Cube Orange 및 6c와 같이 PX4 및 ArduPilot 소프트웨어를 실행하는 오토파일럿을 대상으로 비행 제어 알고리즘을 생성하고 배포합니다. SITL(Software-in-the-Loop) 및 HITL(Hardware-in-the-Loop) 시뮬레이션을 실행하여 비행 제어 알고리즘을 검증합니다. MAVLink(Micro Air Vehicle Link) 통신 프로토콜을 사용하여 오토파일럿 하드웨어와 통신합니다. 지원되는 오토파일럿의 전체 목록은 Supported PX4 Autopilots 항목을 참조하십시오.
카테고리
- UAV Toolbox Support Package for PX4 Autopilots
UAV Toolbox를 사용하여 PX4 Autopilot 주변기기에 액세스하고, Embedded Coder®를 사용하여 비행 제어 알고리즘을 자동으로 빌드하고 배포
- UAV Toolbox Support Package for ArduPilot Autopilots
UAV Toolbox를 사용하여 ArduPilot Autopilot 주변기기에 액세스하고 Embedded Coder를 사용하여 비행 제어 알고리즘을 자동으로 빌드하고 배포
- MAVLink 지원
Micro Air Vehicle Link 통신 프로토콜 dialect 및 메시지
추천 예제

Read GPS Data from PX4 Autopilot
Read GPS data from PX4 autopilot in Simulink using GPS block.
Design and Tune Quadcopter Position Controller for PX4 Autopilot
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller for a quadcopter.

Receive Mission and Flight Parameter Data in Simulink Using MAVLink Microservices
Implement MAVLink Microservices in Simulink to receive mission and flight parameter data from QGroundControl.

Design Quadrotor Position and Attitude Controllers for ArduCopter
Use the UAV Toolbox Support Package for ArduPilot® Autopilots to design position and attitude controller for ArduCopter in Simulink®. This example is designed to run with the ArduPilot Host Target, allowing you to perform Software-in-the-Loop (SITL) simulation.
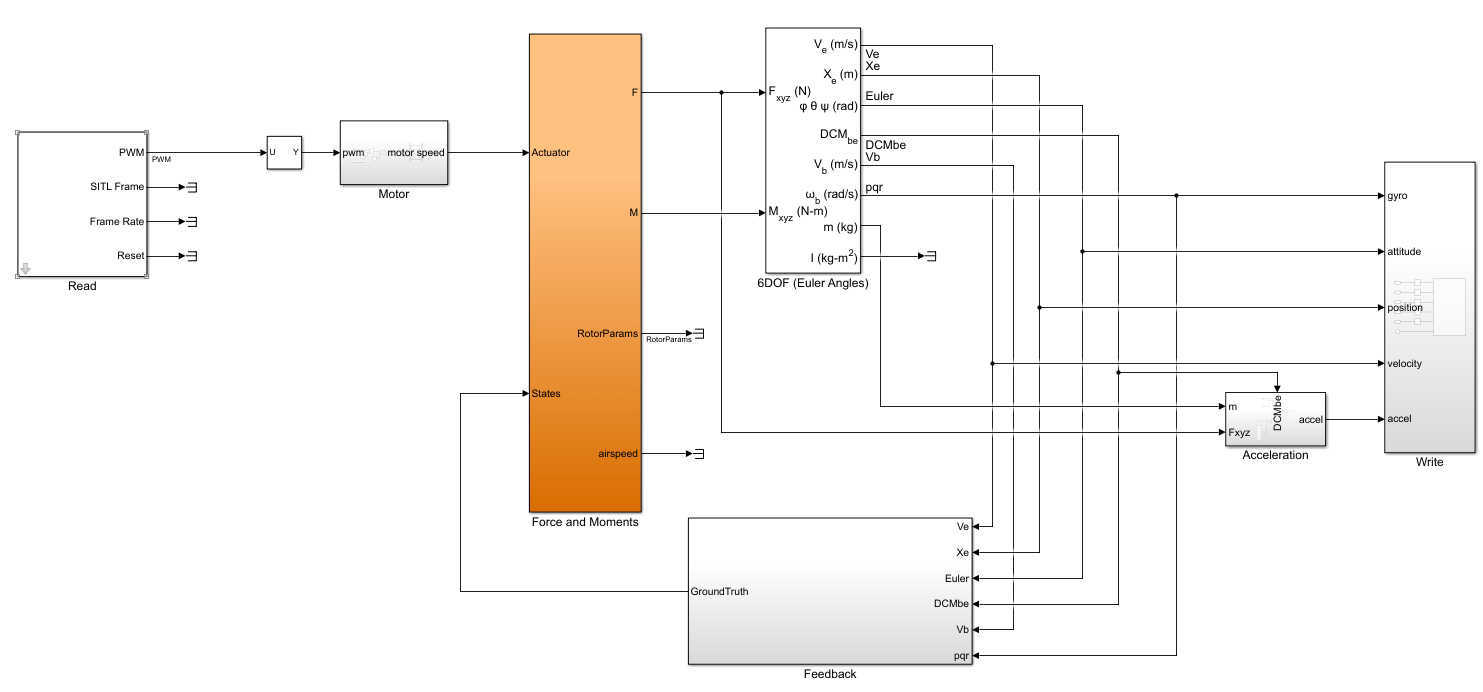
Run ArduPilot Software-in-the-Loop Simulation with Quadcopter Plant in Simulink
Verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink.