Inverse Park Transform
dq0에서 abc로의 변환 구현

라이브러리:
Simscape /
Electrical /
Control /
Mathematical Transforms
설명
Inverse Park Transform 블록은 회전자 기준 프레임에서의 시간 영역 직접 성분, 직교 성분, 영상 성분을 abc 기준 프레임에서의 3상 시스템의 성분으로 변환합니다. 이 블록은 Park 변환의 불변 버전을 구현하여 회전자 기준 프레임에서의 시스템의 전력으로 유효 전력과 무효 전력을 유지할 수 있습니다. 평형 시스템에서 영상 성분은 0입니다.
3상 시스템의 a축을 시간 t = 0에서 회전자 기준 프레임의 d축 또는 q축에 정렬되도록 블록을 구성할 수 있습니다. 아래 그림은 abc 기준 프레임과 회전자 d-q 기준 프레임에서 고정자 권선의 자기적 축의 방향을 보여줍니다.
a축과 q축은 초기에 정렬됩니다.

a축과 d축은 초기에 정렬됩니다.

두 경우 모두 각도 θ = ωt입니다. 여기서 각각은 다음과 같습니다.
θ는 q축 정렬의 경우 a축과 q축 사이의 각도이거나 d축 정렬의 경우 a축과 d축 사이의 각도입니다.
ω는 d-q 기준 프레임의 회전 속도입니다.
t는 초기 정렬에서의 시간(단위: 초)입니다.
아래 그림은 등가인 평형 dq0와 abc의 개별 성분의 시간 응답을 보여줍니다.
a상 벡터를 q축에 정렬

a상 벡터를 d축에 정렬

정의 방정식
Inverse Park Transform 블록은 a상에서 q축으로의 정렬을 위한 변환을 다음과 같이 구현합니다.
여기서 각각은 다음과 같습니다.
d와 q는 회전자 기준 프레임에서의 2축 시스템의 성분입니다.
a, b, c는 abc 기준 프레임에서의 3상 시스템의 성분입니다.
0은 고정자 기준 프레임에서의 2축 시스템의 영상 성분입니다.
전력 불변 a상에서 q축으로의 정렬의 경우, 블록은 다음 방정식을 사용하여 변환을 구현합니다.
a상에서 d축으로의 정렬의 경우, 블록은 다음 방정식을 사용하여 변환을 구현합니다.
블록은 전력 불변 a상에서 d축으로의 정렬을 다음과 같이 구현합니다.
예제

전기 엔진 다이노
이 예제에서는 전기차 동력계 테스트를 모델링하는 방법을 보여줍니다. 테스트 환경에는 기계 샤프트를 통해 연이어 연결된 비동기기(ASM)와 매립형 영구 자석 동기기(IPMSM)가 포함되어 있습니다. 고전압 배터리가 제어된 3상 컨버터를 통해 이 두 머신에 전력을 공급합니다. 164kW ASM은 부하 토크를 생성합니다. 35kW IPMSM은 테스트 대상 전기 기기입니다. Control Machine Under Test(IPMSM) 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Control Load Machine(ASM) 서브시스템은 싱글레이트를 사용하여 ASM의 속도를 제어합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

48V 스타터 발전기에서의 에너지 평형
An interior permanent magnet synchronous machine (IPMSM) used as a starter/generator in a simplified 48V automotive system. The system contains a 48V electric network and a 12V electric network. The internal combustion engine (ICE) is represented by basic mechanical blocks. The IPMSM operates as a motor until the ICE reaches the idle speed and then it operates as a generator. The IPMSM supplies power to the 48V network, which contains the R3 power consumer. The 48V network supplies power to the 12V network which has two consumers: R1 and R2. The total simulation time (t) is 0.5 seconds. At t = 0.05 seconds, the ICE turns on. At t = 0.1 seconds, R3 switches on. At t = 0.3 seconds, R2 switches on and increases the load on the 12V electric network. The EM Controller subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The DCDC Controller subsystem implements a simple PI controller for the DC-DC Buck converter, which feeds the 12V network. The Scopes subsystem contains scopes that allow you to see the simulation results.

HESM 토크 제어
이 예제에서는 하이브리드 여자 동기기(HESM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 영구 자석과 여자 권선은 HESM을 여자합니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

HESM 속도 제어
이 예제에서는 하이브리드 여자 동기기(HESM) 기반 전기-견인 드라이브에서 각속도를 제어하는 방법을 보여줍니다. 영구 자석과 여자 권선은 HESM을 여자합니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 HESM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. 이 제어 구조는 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 3개로 이루어집니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
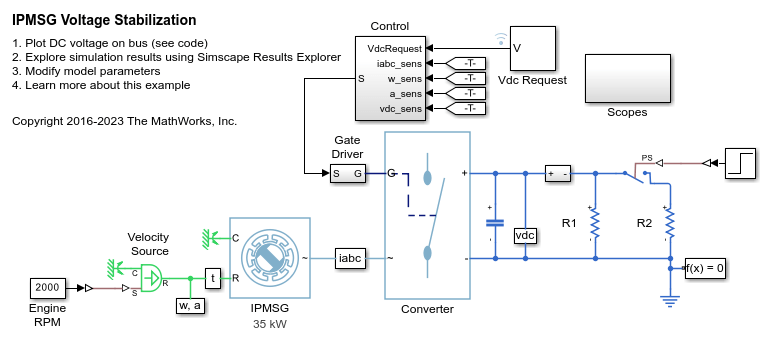
IPMSG 전압 안정화
Control an Interior Permanent Magnet Synchronous Generator (IPMSG) based low voltage generator system for a hybrid electric vehicle (HEV). The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results. An ideal angular velocity source, which represents a combustion engine, drives the IPMSG. The IPMSG supplies low-voltage power to loads R1 and R2. At t = 0.4 seconds, the switch closes, increasing the load.

병렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 병렬 하이브리드 전기차(HEV)를 보여줍니다. IPMSM(내부 영구 자석 동기기)과 ICE(내연 기관)는 차량에 추진력을 제공합니다. IPMSM은 모터 모드와 발전기 모드 모두에서 작동합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 토크 명령으로 변환합니다. 차량 제어 전략은 Stateflow® 상태 머신으로 구현됩니다. ICE Controller 서브시스템은 내연 기관의 토크를 제어합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

직렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 직렬 HEV(하이브리드 전기차)를 추진하는 IPMSM(매립형 영구 자석 동기기)을 보여줍니다. 고전압 배터리에 연결된 이상적인 DCDC 컨버터는 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. 연소 기관으로 구동되는 발전기가 고전압 배터리를 충전합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 운전자 입력을 IPMSM과 발전기에 대한 명령으로 변환합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

직렬-병렬 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 직렬-병렬 하이브리드 전기차(HEV)를 보여줍니다. IPMSM(내부 영구 자석 동기기)과 ICE(내연 기관)는 차량에 추진력을 제공합니다. ICE는 또한 전기 발전기를 사용하여 주행 중에 고전압 배터리를 충전합니다. 차량 변속기와 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 토크 명령으로 변환합니다. 차량 제어 전략은 Stateflow® 상태 머신으로 구현됩니다. ICE Controller 서브시스템은 내연 기관의 토크를 제어합니다. Generator Controller 서브시스템은 전기 발전기의 토크를 제어합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

차축-드라이브 HEV에서의 IPMSM 토크 제어
이 예제에서는 단순화된 차축-드라이브 전기차를 추진하는 매립형 영구 자석 동기기(IPMSM)를 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 모터 모드와 발전기 모드 모두에서 작동합니다. 차량 변속기 및 차동 기어는 고정 비율 기어 감속 모델을 사용하여 구현됩니다. Vehicle Controller 서브시스템은 드라이버 입력값을 이에 대응하는 토크 명령으로 변환합니다. Drive Controller 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

IPMSM 속도 제어
이 예제에서는 매립형 영구 자석 동기기(IPMSM) 기반의 자동차 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. Control 서브시스템의 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.

SM 토크 제어
이 예제에서는 동기기(SM) 기반 전기-견인 드라이브에서 토크를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 각속도 소스가 부하를 제공합니다. Control 서브시스템은 개루프 접근법을 사용하여 토크를 제어하고 폐루프 접근법을 사용하여 전류를 제어합니다. 각 샘플 시점에 토크 요청은 관련된 전류 기준으로 변환됩니다. 전류 제어는 PI 기반입니다. 시뮬레이션은 모터 모드와 발전기 모드 모두에서 몇 가지 토크 스텝을 사용합니다. 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

SM 속도 제어
이 예제에서는 동기기(SM) 기반 전기-견인 드라이브에서 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터(고정자 권선의 경우)와 제어된 4사분면 초퍼(회전자 권선의 경우)를 통해 SM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 3개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. Control 서브시스템의 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

동기식 릴럭턴스 머신 속도 제어
이 예제에서는 동기식 릴럭턴스 머신(SynRM) 기반 전기 드라이브에서 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 SynRM에 전력을 공급합니다. 이상적 토크 소스가 부하를 제공합니다. Control 서브시스템은 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. 이 제어 구조는 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개로 이루어집니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

센서 제어가 포함된 3상 비동기식 드라이브
이 예제에서는 센서 회전자 자속 기준 제어를 사용하여 ASM(비동기기)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.

센서리스 제어가 포함된 3상 비동기식 드라이브
이 예제에서는 센서리스 회전자 자속 기준 제어를 사용하여 비동기기(ASM)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.
포트
입력
출력
파라미터
참고 문헌
[1] Krause, P., O. Wasynczuk, S. D. Sudhoff, and S. Pekarek. Analysis of Electric Machinery and Drive Systems. Piscatawy, NJ: Wiley-IEEE Press, 2013.
확장 기능
버전 내역
R2017b에 개발됨