로보틱스
Simscape™ Multibody™는 매니퓰레이터, 휴머노이드 로봇, 드론 등의 로봇 시스템을 설계, 시뮬레이션, 테스트할 수 있는 툴을 제공합니다.
도움말 항목
- Perform Forward and Inverse Kinematics on a Five-Bar Robot
This example shows how to use the
KinematicsSolverobject to perform forward kinematics (FK) and inverse kinematics (IK) on a five-bar robotic mechanism.
추천 예제

Cable Robot
Models a cable robot. The robot comprises 8 independent belt-cable circuits which control the 6 degrees-of-freedom of the mover. A ball is dropped from a fixed height down the center axis of the mechanism. The mover initially starts directly below the ball and the contact is modeled between the mover and the ball such that the ball bounces elastically when striking the mover. The objective of the mover is to perform increasingly complex maneuvers between successive bounces of the ball. The mover is motion actuated from which the necessary cable, pulley, and motor spool kinematics are computed.
Cartesian 3-D Printer
Models a Cartesian 3-D printer. The model allows you to specify the rotational motion of the motor on each axis to define a printing path. In this example, the printing head moves along the edges of two letters, S and M, using the predefined rotational motions.

Computing Actuator Torques Using Inverse Dynamics
Illustrates the use of motion actuation to determine the actuator torques needed for the robot to achieve a given welding task. The system consists of a seven degree of freedom robot carrying a welding torch. The tip of the torch needs to trace the joints being welded. In this example the tip of the torch is made to trace (using motion actuation) a plus sign, a circle and a star sign on the workpiece. The torch is lifted off the workpiece when transitioning between the different shapes. The motion of the welding torch is specified and the actuator torques required at the various joints of the robot to achieve this motion is computed.

Creating a Mobile Robot Using a MATLAB App
Demonstrates how a multibody system can be built using an interactive MATLAB® app. In this example an application for exploring the design space of a multibody system is shown. The system here is a mobile manipulator with four omni-directional wheels.

Creating a Robotic Gripper Multibody in MATLAB
Constructs a robotic gripper multibody in MATLAB®. It demonstrates how various classes under simscape.multibody.* namespace can be used to build a hierarchical multibody system.

휴머노이드 로봇
이 예제는 smimport 명령을 사용하여 URDF 파일에서 가져왔습니다. 이 예제를 만들기 위해, 로봇 부품을 시각화하는 URDF 파일 "Humanoid.urdf"와 STEP 파일이 사용되었습니다. 로봇이 흥미로운 움직임을 수행할 수 있도록, 가져온 모델에 조인트의 모션 액추에이션이 수동으로 추가되었습니다.

Package Delivery Quadcopter
Models a package delivery quadcopter. The quadcopter takes off from the launchpad and delivers the package to the drop-off location while following a desired trajectory.

Pick and Place Robot Using Forward and Inverse Kinematics
Model a delta robot performing a pick and place task.
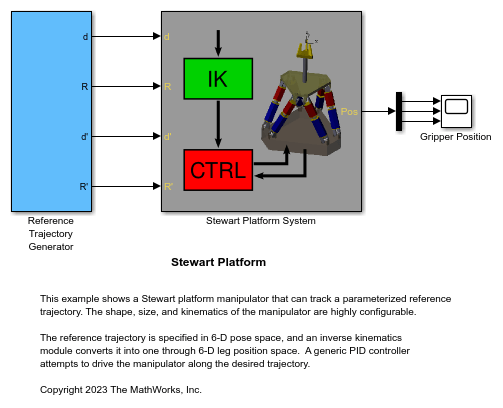
스튜어트 플랫폼
이 모델은 파라미터화된 기준 궤적을 추종할 수 있는 스튜어트 플랫폼 매니퓰레이터를 보여줍니다. 매니퓰레이터의 형태, 크기, 기구학을 자세히 구성할 수 있습니다.
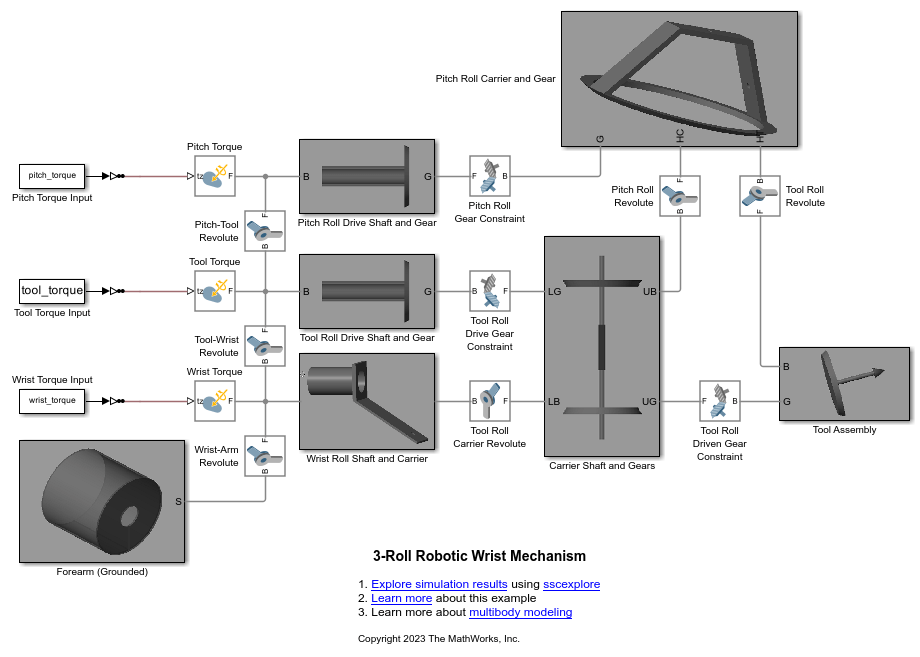
3-Roll Robotic Wrist Mechanism
Models a 3-Roll robotic wrist mechanism based on the Cincinnati-Milacron 3-roll wrist mechanism. The mechanism uses three bevel gear pairs to rotate the tool about 3 independent axes. The tip of the tool moves along the surface of a sphere and can be rotated about an axis that passes through the center of that sphere (drilling action). In this example, precomputed torques are applied to the three drive shafts to achieve a certain trajectory (on the surface of the sphere) of the tool tip. Drilling is performed at different points along the trajectory.

Train Humanoid Walker
Model a humanoid robot using Simscape Multibody™ and train it using either a genetic algorithm (which requires a Global Optimization Toolbox license) or reinforcement learning (which requires Deep Learning Toolbox™ and Reinforcement Learning Toolbox™ licenses).