항공우주
Simscape™ Multibody™는 항공기와 우주선 설계의 복잡한 기계 시스템을 모델링하고 시뮬레이션할 수 있는 툴을 제공합니다. 다양한 우주 조건에서 시스템을 시뮬레이션할 수 있습니다.
추천 예제
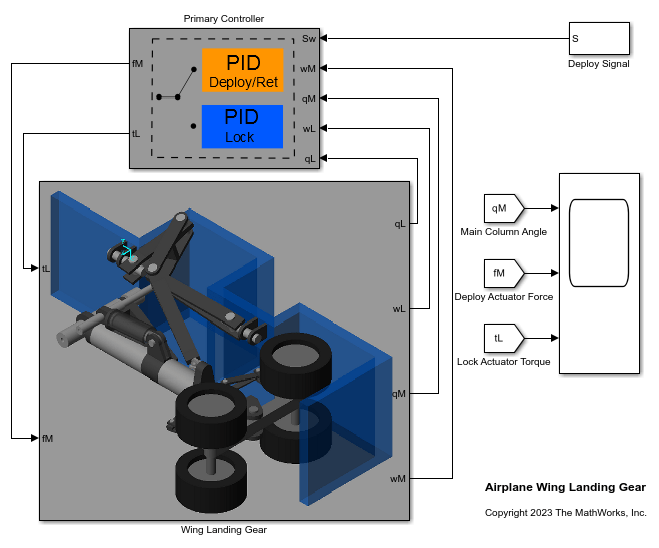
Airplane Wing Landing Gear
A wing landing gear mechanism that can deploy and retract based on the input deploy signal. The mechanism consists of the main column that houses the wheel assembly and the locking mechanism that is used to lock the landing gear in the deployed position.

Cable Driven Space Manipulator
Models a cable driven space manipulator. The manipulator comprises of 2 links connected via a system of revolute joints. Each link consists of belt-cable circuits which drive the movements of the manipulator. It also consists of a spring-damper system which provides different stiffness requirements. A space application is shown in this example where the objective of the manipulators is to capture a small satellite. The manipulators start from folded states and then perform necessary maneuvers to extend and reach the desired position. The pulleys are motion actuated from which necessary belt-cable kinematics are computed.

화성 로버의 모델링 및 제어
이 예제에서는Simscape Multibody와 Robotics System Toolbox를 사용하여 표본 회수 작업을 수행하는 화성 로버를 모델링합니다. 이 로버는 단단한 지형 표면에서 목표 경로를 따라가다가 목표 지점에 멈춰 매니퓰레이터를 사용하여 표면에서 표본을 집어서 저장합니다. 다음의 주요 기능을 사용하여 이 응용 모델의 다양한 측면을 모델링합니다.